



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

一种智能双模数控伺服进给控制器设计
以数控伺服进给控制器为研究对象,采用在全论域范围内带有自调整模糊规则因子和模糊比例因子的自适应控制策略,提出一种可提高数控伺服进给系统动态性能的智能Fuzzy PID双模控制器设计方法。仿真分析证明该方法在不同的工作状态下,根据不同的响应阶段的动态性能要求在线自动调整控制器的控制参数和控制算法,可有效地克服传统控制算法存在的扰动、超调量大、调节时间长等缺点。Matlab软件仿真证明该控制器较常规PID、模糊控制器具有响应快、超调小、鲁棒性强和自寻优等特点。
数控进给伺服系统是数控设备的核心部件之一,其动态性能的好坏对整个系统性能起着决定性的作用。由于数控伺服系统结构复杂,各组成环节具有非线性、时变性、机电耦合等,影响了整个数控伺服进给系统的动态性能。目前,在数控进给伺服系统控制研究方面的文献还相对较少,虽然文献中引入了一些模糊控制理论,但效果并不理想。如文献中论述了为满足椭圆活塞车削对伺服系统快速性的要求,基于模糊控制理论设计了自校正PID控制器;文献将Fuzzy控制器和PID控制器有机地结合,设计出一种新型混合智能调节器———“FuzzyPID”控制器;文献讨论了采用模糊推理自校正的方法,来对PI控制器的控制参数进行实时自整定。然而,上述方法在控制器中都没有规则因子,只是单纯地调整PID控制器的参数,效果不太理想。笔者以图1典型闭环数控伺服进给控制器为研究对象,以提高进给伺服系统的动态性能为目的,根据数控进给伺服系统的特点和性能要求,采用基于自调整比例因子和自调整规则因子的SelfadaptiveFuzzyPID双模控制技术对系统进行控制。
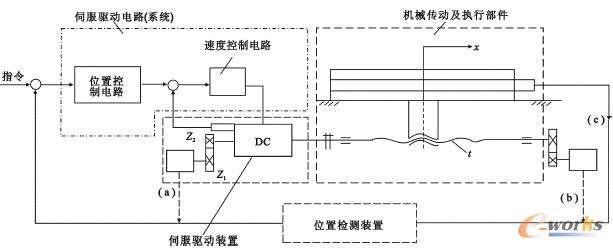
图1 闭环数控进给伺服系统结构
1 数控伺服进给系统及性能分析
1.1 数控伺服进给系统模型
图2为闭环数控进给伺服系统的简化模型。图中m为执行部件的质量,Cr为导轨副上的粘性阻尼系数,k为机械传动刚度,i为电机轴到丝杠的传动比,L为丝杠导程,PE(S)为电机的传递函数,θM(S)为直流伺服电机的角位移,kN为位置环增益系数,kv为速度反馈环的增益系数,kA为速度环增益系数。
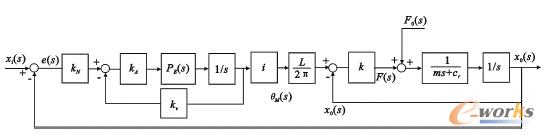
图2 数控进给伺服系统框图
1.2 影响伺服系统动态性能的主要因素
利用Matlab软件对伺服系统进行动态仿真分析,如图3所示。从图3可见:速度环增益、位置环增益、负载质量等时变因素对进给伺服系统伺服动态特性影响较大。要减弱这些时变因素对数控进给伺服动态性能的影响,惟一可行的方法是改变常规的控制策略,选用一种能根据主要影响因素的变化实时地改变控制参数或控制结构,减弱或消除对数控进给伺服系统伺服动态性能的影响。
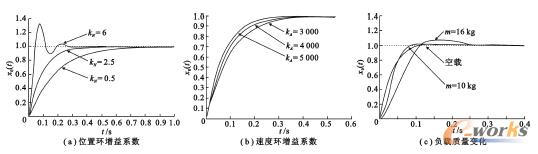
图3 位置环增益系数、速度环增益系数和负载质量变化对伺服系统位置阶跃响应影响