



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

三伺服机械手在注塑机的研究与应用
引言
机械手是能够模仿人手和手臂的功能,按固定程序抓取、搬运物件或操作工具的自动装置,它是近代自动控制领域当中出现的一项新技术,并成为现代机械制造生产系统中的一个重要的组成的部分。机械手的迅速发展是由于它的积极作用正日益为人们所认识:其一、它能部分代替人工操作;其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;其三、它能操作必要的机具进行焊接和装配。现代化的注塑机都配有机械手,机械手是能够模仿人体手臂的部分功能,可以对注塑产品进行自动取出,使其按照预定要求对产品进行堆叠、排列及摆放。生产同类产品的时候,注塑机注射及成型的时间基本固定,因此注塑机的效率取决于产品的取出时间,每一次的开模完成到下一次合模完成的时间决定了注塑机的工作效率,机械手取出产品的时间越短,注塑机的效率越高。
本文主要就三伺服机械手的机械结构分析及控制系统设计进行分析讨论,从现有的机械手出发,通过三维软件Pro/Engineer设计并加工出三伺服机械手实体,通过多轴运动控制器配合触摸屏进行三伺服机械手控制器的研发。
(1)通过三维设计软件Pro/Engineer,设计装配出三伺服机械手的三维模型。应用有限元数值分析软件PAIRAN对所设计的三伺服注塑机械手进行数值仿真分析。
(2)通过计算的方式给出了伺服电机的容量选择的方法。确定了三伺服机械手在位置控制方式下的硬件接线方式及伺服电机的参数调整的方法。
(3)利用步科伺服开发出三伺服机械手的运动控制系统,分析了机械手自动运行的流程,并介绍了运动控制系统的部分主程序的功能。
1 三伺服机械手的有限元分析
注塑机机械手在机械设计及控制系统设计方面都要求做到稳定可靠。利用三维软件Pro/Engineer设计出三伺服机械手模型,并利用有限元的方法对三伺服机械手模型进行了静力分析、模态分析、谐响应分析。根据有限元计算结果进行对比分析,优化了三伺服机械手结构模型。
1.1 三伺服机械手机械模型介绍
根据现有的全气动、单伺服机械手通过Pro/Engineer建立了三维机械手的模型如图所示:

1.2 机械手振动模态分析计算
对所设计的样机进行振动模态分析,以确定的固有频率和振型,避免机器在工作时发生共振,同时为分析结构动态响应和其他动力特性提供理论依据。机械手一般工作在低阶频率下,因此在对结构进行模态分析时,未求出全部固有频率和振型,重点考虑机械手系统的低阶频率,给出了前四阶振型图:
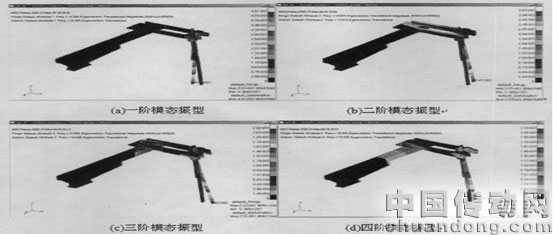
1.3 机械手振动模态分析计算
利用PATRAN软件对优化后的机械手进行模态分析,并列出前4阶的节点振幅云图。
2 机械手伺服电机的选择与应用
伺服电机的选型及调试直接影响着机械手的整体性能。伺服电机容量不足,机械手长时间工作会出现过载;伺服电机容量过大,影响机械手性能的发挥;伺服调试的不好,机械手动作不协调、不稳定,达不到理想的控制效果。
2.1 容量选择计算概述
伺服电机的选型是依靠选型软件选择的,但是每一品牌的伺服电机都对应着一款伺服选型软件,这样就制约着伺服电机型号的合理选择,用户必须将伺服电机选型软件完全弄懂,同时配合实际的伺服电机使用经验才能正确选择,因此,给出通用的计算的方法来进行伺服电机的容量选型,以增加伺服电机选择的灵活性显得很有意义。
伺服电机容量的计算
W、Wl:可动部分重量;W2配重重量;户:摩擦系数;GL:减速比;BP丝杆;螺距(mm)
1、伺服的最大移动速度V
机械手移动最大速度受两个因素影响,
(1)、同步带轮的齿数及齿距。此数值越大机械手移动的越快。
(2)、减速机减速比,减速比越小机械手速度越快。小惯量伺服电机额定转速一般为2500-300Or/min,中惯量以上额定转速约为1500-2000r/min。
本次开发所选横行部减速机及皮带轮参数如下:
选用精锐广用减速机,减速比1:10,同步轮齿数20,由于本次开发的机械手属于中型机械手,主要安装对象为中型注塑机,对速度要求不高,根据上述计算,选用1:10减速比的减速机完全符合要求。
2.2 伺服电机的应用
通过对机械手电气部分的安装调试,发现伺服电机的稳定性决定着伺服电机的总体性能,本次开发选用伺服电机的位置控制方式来驱动伺服电机,具有定位准确、抗干扰能力强等优点。
2.2.1 位置方式下伺服的硬件连接
三伺服的机械手采用伺服的位置控制方式驱动电机,以步科I000w的伺服电机
ED430-0100-LA-K-000为例,驱动器电源接线方式如下:
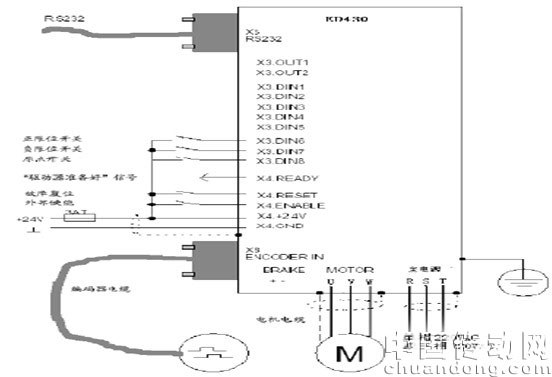
为了运行电机,需要配备下列各项元件:
1.逻辑电压24VDC(低压,与230VAC安全隔离)提供给驱动器控制电路的的逻辑电源。
2.动力电源(24VDC~70VDC)单相或者三相220VAC提供给ED430系列伺服驱动器
3.ED430驱动器+接线端子头
4.电机及相关电缆(电机电缆、编码器电缆,RS232编程通讯电缆)
5.一个带原点和限位开关的机械结构(如导轨)
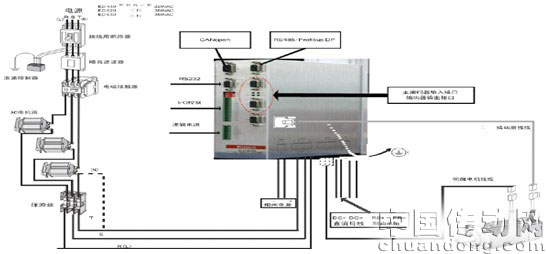
2.2.2给驱动器提供逻辑电源(控制器的电源X4)
逻辑电源电压有效范围18V-30VDC,接X4的+24VGND。
ED伺服驱动器外部接线图请参考下图
3 机械手人机界面的开发设计
3.1 触摸屏的基本原理
触摸屏的基本原理是,用手指或其他物体触摸安装在显示器前端的触控屏时,所触摸的位置(以坐标形式)由触摸屏控制器检测,并通过接口(如RS一2犯串行口)送到CPU,从而确定输入的信息。触摸屏系统一般包括触摸屏控制器(卡)和触摸检测装置两个部分。
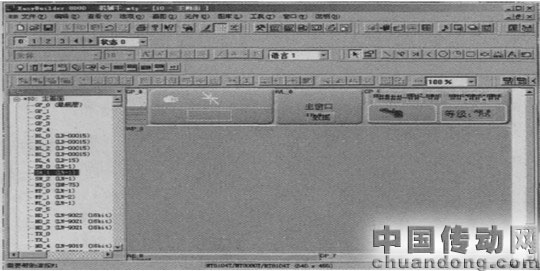
触摸屏参数设置
触摸屏的开发更具灵活多样,可以满足机械手系统的开发需求。适合工业开发使用,通过编写宏程序,能够实现复杂的机械手人机交互界面形式,适合机械手用户,选用步科MT4403T的触摸屏。画面如图:
- 上一篇文章:基于数控流水线技术的开放式数控系统(上)
- 下一篇文章:注塑机伺服常见问题及解决方案