



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于MSP430F149的变频伺服系统的设计与研究
0引言
近年来,伺服系统的发展始终以稳定性、响应性与精度为发展主轴,这也是用户在使用过程中最为看重的几大因素。在机床伺服系统、机器人控制系统、雷达天线控制系统等场合大都由直流伺服电机和直流伺服控制器来完成控制。在这些控制领域中,主要以负载的位置或角度等为控制对象的伺服控制系统[1]。随着变频器技术的高速发展,在伺服系统中交流变频传动因其功率因数高、反应速度快、精度高、适合在恶劣环境中使用等优点得到了越来越广泛的应用。本文提出一种基于高性能单片机MSP430F149、变频器、变频电机组成的数字式变频伺服系统,并将数字PID算法引入到此系统中,使系统获得了良好的系统静、动态性能。
1变频伺服系统的功能
为达到变频伺服系统的运行可靠、良好的静态以及动态的性能要求,其功能如下:
1)精确的伺服控制功能
高精度、高速度、大功率是伺服系统的发展趋势,系统采用高速单片机作为核心控制器,对变频器进行控制,使伺服系统的控制达到更高的精度。
2)通信功能
单片机与上位机之间必须确保通信的正常与正确,单片机将接收到来自上位机的控制命令与采样到的反馈信号相比较得到偏移控制量,只有得到相应的偏移量,单片机才对变频器输出相应控制信号。
3)反馈量精确采集功能
反馈量采集的精确度直接关系到控制精度,系统采用变M/T方法对伺服电机进行转速采样,采样精度较M法、T法更加精确,从而确保了更加精确的控制。
2系统硬件设计
系统以单片机MSP430F149为核心控制器[2],集成变频器、变频电机、采样编码器以及PC上位机组成。其系统原理框图如图1所示。
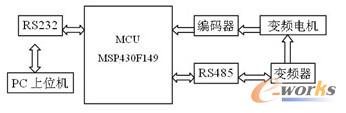
图1系统框图
其控制过程为:单片机MSP430F149控制协调系统各功能模块工作;PC上位机通过串口UART0将控制信号传输给MSP430F149,单片机通过对反馈信号采样后进行处理,将处理后的数据与来自上位机的控制信号相互比较,得到误差量,再将误差量经过相应的运算得到伺服系统控制量;MSP430F149将得到控制量通过串口UART1直接转换成RS485信号输出至变频器,变频器根据接收到的控制信号产生变频变压的电源信号以驱动电机完成期望动作;同时上位机通过MSP430F149的串口UART0获取变频电机的速度、系统参数等形成打印报表,为操作人员良好人机操作界面。
2.1单片机单元
MSP430F149是变频交流伺服系统的核心控制器,完成系统控制信号与测量信号的传递及复杂的控制决策,协调各模块进行工作,操作控制指令的接收与识别。此单片机是一种超低功耗微控器,采用16位的体系结构,16位的CPU集成寄存器和常数发生器,实现了最大化的代码效率。包括2个内置16位的定时器、一个快速12位A/D转换器,两个通用串行同步异步通讯接口和48个I/O端口,片内包含60KFLASHROM和2KBRAM。本设计是实时控制系统,需对数据进行实时采集和传输。MSP430F149中60KFLASH存储器可满足系统程序对烧录存储空间的需要,内部数据RAM(2K)保证了数据实时采集、处理和传输,48个数字外设端口方便地实现了与外围器件的数据传输与控制,16位的体系结构保证了系统能够完成复杂的控制决策,而双串口UART则满足了控制器与上位机及变频器的实时通信需要。
- 上一篇文章:基于PLC的单神经元PID控制器的设计与实现
- 下一篇文章:基于hyperMILL自动编程五轴刀路的数控加工