



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

嵌入式数控系统的体系结构与系统设计(下)
3 系统设计
根据嵌入式系统的技术特点,基于Intel XscalePXA275的ARMl0微控制器,设计一套基于CAN高速现场总线的分布式多微处理器控制结构的嵌入式数控系统如图4所示。
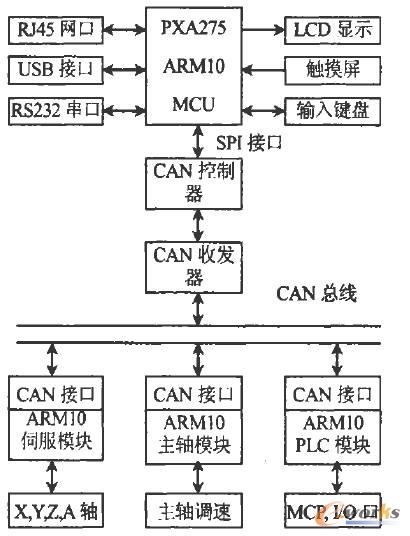
图4 基于CAN总线的嵌入式数控系统的实现方案
3.1上位机结构设计
上位机采用基于工控应用场合的ARMl0微控制器的芯片PxA275(工作主频为520MHz)作为控制核心,结合相应器件扩展各个模块如下:
(1)结合DM9000接口芯片,在总线上扩展RJ45网口电路,实现网络连接。
(2)引出ARMl0的DN0与DP0引脚信号,与+5V电源引脚及地线,组成USB接口电路。
(3)采用芯片MAx3232电路,在总线上扩展RS232接口电路,实现串口通信。
(4)ARMl0芯片的输出引脚上设计有驱动LCD显示的FrameBuffer控制信号线,将之引出,与LCD显示屏的对应引脚相连,即可实现图形显示;而且,在该连接插座上,可以增加连接MCU的nYPON、nXPON、XPOS、YPOS、XMON、YMON信号线的驱动电路,即可实现触摸屏的输入功能。
(5)基于ARMl0芯片的IIC总线,结合ZLG7290键盘扩展芯片,可扩展出8 x 8的键盘输入接口,用于上位机的功能指令和程序输入。
以上是上位机的基本模块设计,其余模块可以通过通过嵌入式系统的功能扩展,给予增减。在嵌入式系统中,每一模块的增减,都需要设计相应的驱动软件,才能使增减的模块实现功能操作。
3.2 下位机结构设计
下位机可以有多种功能控制模块,在嵌入式数控系统中,主要有伺服电动机驱动模块、主轴驱动模块和嵌入式PLC扩展模块等。
(1)伺服电动机驱动模块。对ARMl0微控制器的接口进行扩展,设计交流伺服电动机的双闭环调速电路和位置控制电路,实现多轴联动复杂曲线的联动控制。为了提高位置控制的实时响应能力,引入FPGA硬件插补电路,结合交流伺服电动机的功放电路,提高伺服控制功能水平。
(2)主轴驱动模块。从ARM10引出控制信号,设计变频调速电路,实现主轴速度输出和主轴编码器信号输入,控制电主轴,实现主轴变频调速。
(3)嵌入式PLC控制模块。在ARMl0微控制器的内部总线上,扩展FPGA电路,定义相应的I,O接口点数,每条I/O线经过功率放大,转换为工作电压为24V的接口线,供标准的PLC控制信号使用。在该PLC接口板上,还可以设计A/D、D/A转换电路,满足包括倍率控制在内的数控功能控制需要。以上每一模块都需要设计高速总线接口,确保上下位机相互间可靠通信。
- 上一篇文章:嵌入式数控系统的体系结构与系统设计(上)
- 下一篇文章:基于嵌入式linux的数控系统软件设计