

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

多轴激光加工机器人光路几何误差建模方法研究(二)
本文以五轴数控激光加工机器人为例,建立其光路传输路径和几何误差模型,试验结果表明了该方法的有效性。
3 五轴联动激光加工机器人误差建模
本文以图2所示的五轴联动激光加工机器人的光路为例,给出其理想和实际条件下的光束传输路径数学模型以及光路几何误差模型。
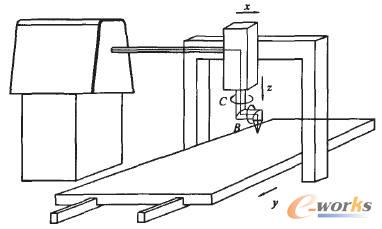
图2 五轴联动激光加工机器人
五轴激光加工机器人光路原理图如图3所示,建立广义坐标系,运用前面的光路几何误差建模方法进行如下分析。
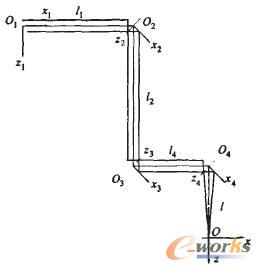
图3 五轴激光加工机器人光路原理
3.1 光线由1到2传输时误差模型
根据光线理想传播路径变换矩阵可得1到2理想传输模型为:

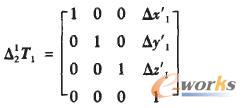
设光线由发出点入射到入射点在x、y、z方向产生位置误差为△x'1、△y'1、△z'1,反射镜片位姿误差为△x"1、△y"1、△z"1、△α1、△β1、△γ1,由式(1)得到入射光线偏差引起的入射点误差矩阵为:
由式(2)得到由于反射镜片的位姿误差引起的入射点位置误差矩阵为:

由式(3)得到由于反射镜片角度误差矩阵为:
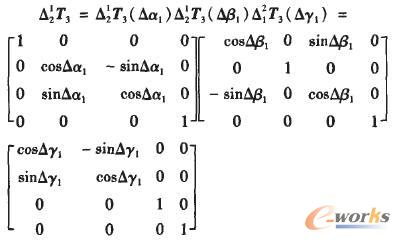
因此误差矩阵为:

当△α、△β、△γ很小时有:
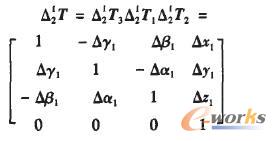
式中:
- 上一篇文章:多轴激光加工机器人光路几何误差建模方法研究(一)
- 下一篇文章:高速数控技术的发展及其应用