



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

数控系统分布式测控系统的实现
引言
随着分布计算技术、网络技术与微电子技术的发展为测控系统向分布式、网络化和以微计算机作为平台的方向发展提供了良好的条件。分布式测控系统(DMCs)是通过计算机网络把分布于各个铡控点的测量设备、测量用的计算机以及各控制节点连接起来,达到测量资源共享、分散采集、集中分析管理等目的,实现了对现场铡控设备监视与控制。分布式测控技术用在数控系统远程监控还在不断尝试中。数控机床的分布式测控系统的实现需要解决现场总线技术和分布式计算两方面的技术。本文设计一个基于CAN总线和CORBA中间件的分布式远程测控系统实现对数控系统,机床的各种静态、动态精度测控。
1 数控机床分布式测控系统的整体设计
本测控系统包含三个层次的子系统:底层铡控子系统、中间测控子系统和顶层客户端子系统,如图1所示。底层(下位铡控系统)采用了CAN现场总线技术,中间层采用基于分布式对象模型(即CORBA)的中间件技术,顶层则为web客户端。
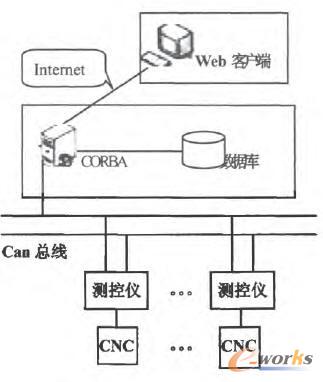
图1 数控测试系统结构模型
测控系统功能描述为:1)底层铡控子系统采集数控机床运动时的脉冲信号通过CAN总线把数据发送到中问服务器系统,同时接受上位调控子系统应用服务器发送过来的控制命令和参数给现场铡控仪,通过数控机床的伺服系统控制数控机床进行相应运动。2)中间服务器系统主要承担协议的转换、数据转发和本地服务器的一些功能。数据经过进一步的加工处理保存到数据库服务器以备检索和加工处理。3)顶层客服端子系统有用于监控/管理的人机界面,操作人员可以通过监控/管理计算机的人机界面发出测试请求和显示测试结果等。通过测控软件的结构化设计使系统实现现场数据的采集、分析、存储以及远程测控等功能。
2 底层测控子系统
为了实现对数控数据的实时采集和处理,在此引入DSP技术。DSP是一种特别适用于进行实时信号处理的微处理器,具有高速的数据处理能力。基于DSP的CAD测控仪的系统原理如图2中,光电隔离用6N137实现,集成电路计数器用LS7266Rl实现,DSP型的CPU用Tl公司的2000系列的1MS320LF2407(自带有CAN控制器),CAN驱动器采用PCA820C250。
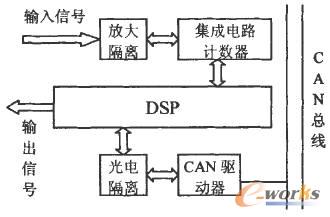
图2 基于DSP的CAN测控仪的系统图
2.1底层测控子系统硬件设计
底层(现场层)的测控仪器的接口与数控机床伺服电机的编码器相连,通过采集编码器的A、A、B、B信号把数控机床运动时的实时的脉冲信号送到CAN测控仪的输入端;由集成度较高的LS7266RI进行采样、滤波、鉴相倍频、计数等,可提高系统的抗干扰性,同时减小了系统的体积,提高了精度和速度,可以在更恶劣的环境下进行可靠的工作。通过对光电编码器的计数,计算出X轴、Y轴的位移。TMS320LF2407微处理器对采来的数据进行简单处理后放到CAN控制器的缓存器里面,最后通过CAN驱动器PCA82C250将信息发布到CAN总线上。高性能CAN总线收发器82C250是CAN控制器和物理总线问的接口,用来增大通信距离,增强系统的瞬间抗干扰能力,提高对总线的差动发送能力和对CAN控制器的差动接收能力。数据通过CAN总线到达CAN总管节点,CAN总管节点充当网关的作用。相反上面传来的请求命令依照同样的道理可以通过CAN网关下传到底层的CAN节点,再通过输出信号通道把命令传给相应的接口电路、伺服系统,以便对数控设备进行控制。高速光电耦合器6N137可增强CAN总线节点的抗干扰能力。TMS320LF2407自带有4K RAM,32KFLAsH程序存储器,芯片自身的存储器己经满足了本系统设计的要求,因此硬件设计时不再扩展数据和程序存储器。选用TPS7301电源管理芯片给瑚S320LF2407 DSP供电:DSP工作电压是3.3V,LS7266R1工作电压是5V,因此采用SN74LvC4245A芯片进行电压转换。
- 上一篇文章:基于ARM的嵌入式数控系统方案研究与应用
- 下一篇文章:可重构分布式数控系统的设计与实现(上)