



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于ARM的嵌入式数控系统方案研究与应用
引言
在本方案中,硬件平台以ARM架构的处理器为核心,操作系统采用Windows CE.NET(WinCE)。ARM架构处理器是RISC型处理器,具有开发移植容易,体积小,功耗低,运算速度快,实时性能好等优点。WinCE操作系统具有友好的操作界面、良好的配套开发环境及其实时性能。这样就使数控系统具有更高集成度、更高可靠性、更低成本、更友好的控制操作界面、更多系统资源和更大内存成为可能。本文主要分析了其软硬件平台的搭建,而重点又放在了软件平台的构建上。
1系统的硬件平台开发
硬件平台采用Intel XScale PXA255处理器,该处理器采用的是ARM的V5版架构。其特点在于超级流水线设计、DSP处理和指令设计中的改进。本平台以此处理器为核心,添加诸多外围模块,搭建成集中式数控系统的硬件体系结构,其框图如图1所示。
进给控制接口是数控系统和进给伺服系统的桥梁,可连接多种电机伺服单元,其形式一般有串行式接口、脉冲式接口、模拟式接口等。本方案采用脉冲式接口。它使用脉冲信号传递位置指令,可控制各种步进电机驱动装置、脉冲接口交直流伺服驱动装置。其特点是通用性强,信号传递抗干扰能力强,不会发生漂移,构成全闭环需要在驱动装置中完成。主轴接口连接数控系统与主轴驱动单元,再配合PLC输入/输出接口,即可连接各种主轴驱动单元。它包含两个部分:主轴速度控制输出和主轴编码器输入。本方案其亦采用脉冲式接口。
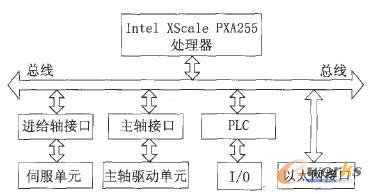
图1 数控系统的硬件体系结构
PLC采用内置式,它的功能由单片机(C8051F123)和门阵列来实现,其硬件结构如图2所示。单片机是PLC的主要部分,是进行运算和控制的中心;门阵列中主要包括输入输出点寄存器、SPI接口和双口RAM。另外,处理器和单片机通过挂接在总线上的双口RAM进行数据通信。单片机的在线系统编程通过UART实现。PLC控制程序完全由单片机来执行,数控系统处理器几乎完全不参与,因此PLC控制程序不再需要作为数控系统软件的一个任务参与内核调度。
2 系统的软件平台开发
该平台采用的是WinCE嵌入式实时操作系统。它较之以前的版本,大大增强了实时性、快速系统启动、中断处理等方面的性能,正适应了自动控制的最重要需求——“时间掌控,实时反应”。但该实时操作系统的实时性属于软实时,而我们数控系统需要的是硬实时,因此,为实现数控系统的实时性,我们更需要对硬件进行合理的配置,而不能单纯由操作系统来保证。
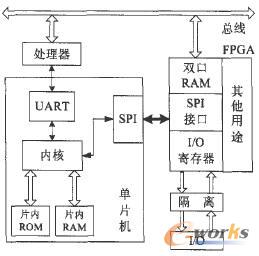
图2 内置式PLC结构
在实时操作系统上进行数控系统软件开发具有许多优点:①弱化功能模块间的耦合关系;②系统的开放性和可维护性好;③可减少系统开发的工作量。数控系统软件是一个典型的实时系统。任务是可并行执行的程序在一个数据集合上的运行过程。数控系统的任务一般可以分为管理任务和控制任务。管理任务主要承担系统资源管理和系统各子任务的调度,负责系统的程序管理、显示、诊断等子任务;控制任务主要完成数控系统的基本功能:译码、刀具补偿、速度预处理、插补运算、位置控制等任务。这些任务按照实时性要求可分为强实时任务(包括实时突发任务和实时周期任务)和弱实时任务。实时突发任务具有随机性和突发性,一般实时性要求很强;实时周期性任务精确地按一定的时间间隔发生;弱实时任务的实时性要求较弱,只需保证在某段时间内得以运行即可。
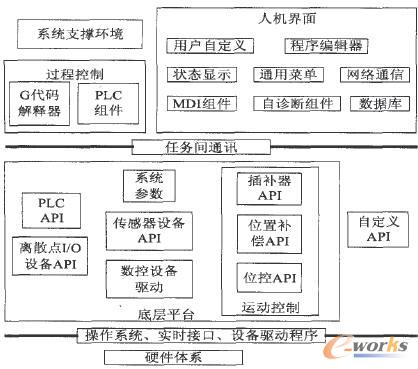
图3 数控系统软件结构
如图3所示,数控系统软件主要模块有:伺服驱动及控制模块、轴控制模块、轴联动控制模块、细插补器、粗插补器、G代码解释器、PLC驱动模块、操作界面及其文件系统。按任务的重要性和实时性,将这些任务由高到低分配优先级。实际上,数控软件的各个任务基本都是一个中断处理的过程。
- 上一篇文章:基于CAN总线的嵌入式数控系统网络化研究
- 下一篇文章:数控系统分布式测控系统的实现