



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

机器人点焊系统的应用
一、前言
现代汽车工业正值进入一个高发展时期,工业机器人在汽车业的应用也日益重要,通过使用机器人可以提高产品质量降低产品成本,因此机器人的系统集成在汽车厂的应用已经是一种趋势,它通过安全可靠灵活的PLC对机器人进行程序选择控制,再配以高速安全的通信网络来实现PLC之间、机器人之间的信息交换和共享,从而实现整个系统安全有效的运行。
二、系统总体设计
点焊机器人控制系统多应用于汽车生产厂焊装车间流水线上,完成汽车地板、侧围、顶盖等整个车外壳的拼装焊接过程。现代汽车厂的焊装车间流水线上已经大量的用工业机器人来取代人工点焊,甚至整条流水线全部由工业机器人取代。系统硬件主要是由工业机器人(R-2000iA型)、焊机、电极打磨器、水气供应系统、PLC(CJ1系列)、触摸屏(NS系列)、DEVICENET模块、ETHERNET总线、服务器等组成。
服务器是整条流水线生产数据的管理器,它管理包括日产量、当前产量、每个工位的车型信号等数据,然后传给PLC。R-2000iA系列机器人是最新一代重型有效负载和高性能的工业机器人。它代表在S-430i系列领先工业机器人的先进发展。在继承S-430i系列机器人的许多特性的同时,R-2000iA机器人在已证明的性能、可靠性、可维护性方面具有更高的使用价值。该机器人主要以系统R-J3iB智能机器人控制系统为特色,其运动范围和最大作用范围都能够达到点焊车体的要求。PLC是控制的核心,它控制机器人的程序选择,包括不同车型的点焊程序、电极帽打磨程序和更换电极帽程序等。CJ1系列PLC是小巧、高速且较为灵活的,其基本系统构成有供电单元、CPU单元、I/0控制单元、存储卡、ETHERNET模块和DEVICENET模块,它对整个系统的整合极为重要。触摸屏是一个操作和信息反馈的平台,NS系列触摸屏具有高分辨率、大容量图象数据、兼容USB接口打印机、响应速度快、支持存储卡等特点。
机器人点焊系统框图如图1所示。系统由服务器通过ETHERNET将工位车型等信息传送至PLCA,PLCA再通过Controller Link通信网络实现PLCA至PLCG之间的信息交换,每个PLC控制2-5个工位不等,通过软件程序的编制实现对流水线上线体、夹具等的电气控制。PLC又通过Device Net网络完成对机器人的程序选择和信息交换。每个PLC又通过RS-485串行通信与1-2个触摸屏通信,操作人员可在通过触摸屏操作不同的工位,检查不同工位的生产信息。
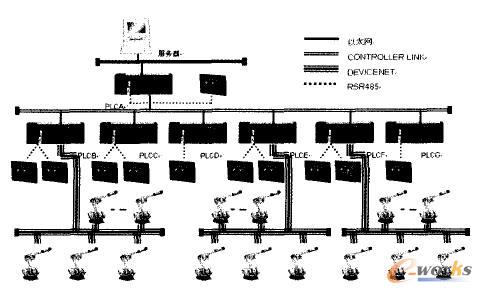
图1 点焊系统框图
三、通信网络的结构
机器人点焊系统的通信网络分为三个层,分别是计算机层、控制器层和设备层。系统的计算机层网络是ETHERNET,PLCA通过CJIW-ETN21模块接入以太网,使用TCP/IP协议从服务器上获取需生产的车体的生产数据信息。系统的控制器层网络是Controller Link网络,PLCA通过CJIW-CLK21模块接入下一极的Controller Link网络,使PLCA至PLCG七个PLC之间可以传送信息。Controller Link是OMRON提供的一种工厂自动化网络,是OMRON的主要的FA级别的网络。它可以在合适的PLC和各种微型计算机之间方便地、灵活地发送和接收大容量数据包,支持能共享数据的数据链接和在需要时发送和接收数据的信息服务,可得到高容量、柔性数据链接及高容量的数据传送,网络采用屏蔽双绞线电缆或光纤连接,最大传输距离随波特率而变,在采用两层中继器的情况下,波特率在500kbit/s时,传输距离可达3km,最大支持62个节点。Controller Link网络是一种使用令牌总线通信的网络,这种总线型拓扑结构具有最大的灵活性,易于扩充和维护,满足系统可扩展性的需求。由于采用了分布式控制技术,可确保Controller Link网络不会因某个站点故障而崩溃,提高了系统的稳定性。它使用CX-Programmer软件设置通信参数,如图2所示。系统的设备层网络是Device Net网络,在PLCB、PLCE和PLCF三个PLC所控制的12个工位上共计有24台机器人,PLCB.PLCE、PLCF和机器人之间是通过DEVICENET网络实现通信。Device Net是一个符合设备网的多主控总线,作为一种开放式的网络和多厂商环境得到人们的普遍认识。其界面已经无缝地组合进所有核心产品中,包括PLC、I/O单元、可编程终端等。Device Net通过DM区设定,能在任何区分配远程I/O通信,每个CPU单元能安装超过一个Device Net单元(固定分配时最多3个),在一个网络中,超过一个Device Net单元能被作为主站连接。使用配置器用Device Net Configurator软件时,能以独立于节点地址的顺序分配。Device Net既能用作主站,又能用作从站,而且主站和从站功能能同时使用。当使用信息通信或CX-Programmer远程编程和监控时,Device Net单元允许用与Controller Link,thernet或其它网络相同的无缝透明方式管理Device Net网络。

图2 Controller Link通信参数设置
- 第1页:机器人点焊系统的应用(1)
- 第2页:机器人点焊系统的应用(2)
- 上一篇文章:工业软件在未来制造业中的作用
- 下一篇文章:SCADA自动化软件平台综述