



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于TCP/IP协议实现上位机对UR机器人的远程控制
1、引言
2010年,德国学术界和产业界提出“工业4.0”的概念,即是以智能制造为主导的第四次工业革命,或革命性的生产方法。该战略旨在通过充分利用信息通讯技术和网络空间虚拟系统—信息物理系统相结合的手段,将制造业向智能化转型。所以,近些年许多工业自动化厂商将自己的产品研发所考虑的一个重要方向定在是否能被远程控制。另一方面,随着国内人工成本的不断上升以及工厂人员流动的不确定性,机器人产业是近几年,相信也是未来几年的朝阳产业。所以对于工业机器人在工厂生产中的远程控制,是一个机器人集成方面比较不错的课题。我们知道,在工业机器人的队伍中,UR机器人是第一家在工业环境下工作的人机协作机器人,它以轻便、简单、安全著称。下面我们就来了解一下如何实现上位机对UR机器人的远程控制。
2、UR机器人提供的基于TCP/IP协议的接口
TCP/IP协议源于1969年,是针对Internet开发的一种体系结构和协议标准,目的在于解决异种计算机网络的通信问题。使得网络在互联时能为用户提供一种通用、一致的通信服务。是Internet采用的协议标准。基于TCP/IP的通讯具有成本低、可靠性高、实用性强、性能高等特点,所以现在许多工业自动化产品都具有基于TCP/IP协议通讯的接口,从而实现设备与设备之间,设备与网络之间的通讯。UR机器人在TCP/IP协议的基础上,提供了丰富的接口用于与外部设备的交互,如表1所述。
端口接口描述
机器人作为服务器
502ModbusTCP协议,机器人作为服务器
22SSH/SFTP(安全文件传输协议)
29999Dashboard功能
30001第一客户端端口,自动返回机器人状态与补充消息
30002第二客户端端口,自动返回机器人状态与消息
30003实时反馈端口,自动返回机器人状态与消息,125Hz实时反馈接口
机器人作为客户端
自定义由UR脚本函数定义
502ModbusTCP协议,机器人作为客户端
表1UR机器人TCP/IP接口表

有了这些接口,上位机就可以远程控制机器人。如图1,简单描述了上位机对UR机器人远程监控的系统图。
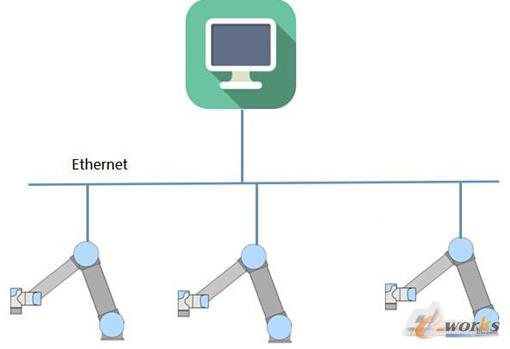
图1远程控制系统图
下面我们就来介绍UR机器人所提供的相关通讯接口,从而远程控制机器人。
- 第1页:基于TCP/IP协议实现上位机对UR机器人的远程控制(1)
- 第2页:ModbusTCP端口
- 第3页:上位机编程端口
- 上一篇文章:机器人在核与辐射事故应急中的应用展望
- 下一篇文章:最新总线技术在仪器控制与连接方面应用