



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

工控机在数控车床检测装置上应用
目前,车辆轮对在镟修前后的检测主要是靠传统的手工尺进行检测,然后将检测的数据手动输入数控车床系统进行车辆轮对镟修,且数控车床的对刀需靠操作工手动进行,不能实现自动对刀。由于传统方式检测方法落后,测量精度低,操作不够便捷,不适应现代化车辆轮对的加工及信息的管理与维护。为此,我们研制了一套与轮对数控车床配套的非接触式检测装置。该装置是集光学、精密机械、电控技术、数据处理、计算机技术于一体的高技术精密检测装置。采用完全非接触测量方式,实现数控车床在镟修前后对车辆轮对的在线检测,并将检测数据经工控机融合处理后传递给数控车床,以指导数控车床自动对刀,自动对车辆轮对的镟修,保证车辆轮对机械加工的外形几何尺寸及加工精度。
1、各需测参数分布
需要检测的车辆轮对几何尺寸参数及其分布如图 1所示。轮缘高度Sh,轮饼直径D,轮缘厚度Sd,轮辋宽W,轮辋内侧面到数控车床参考零点的距离Ri。重复测量的平均值误差小于±0.1mm。
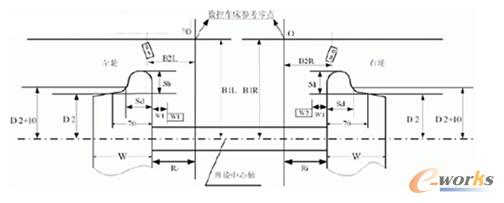
图1 车辆轮对几何参数示意图
由于各车辆轮对的轮饼直径尺寸大小不一,故确定测量方法尤为重要。根据对轮对的分析及轮对数控车床镟修的特点,以选择数控车床高精度顶尖顶紧轮对轴中心孔时作为检测轮对的定位基准,通过此基准可以确定如图1所示的理论中心轴线从而得到基于此理论中心轴线及数控车床参考零点的标定值然后经过将标定值与各测量值进行融合处理换算得到所需的车辆轮对几何参数值。得到车辆轮对的几何尺寸参数后,工控机与数控车床的PLC之间进行串口通信,将数控车床镟修轮对时所需的所有参数传送给数控系统,数控系统便可根据接收到的参数实现自动镟修轮对。
2、系统的基本组成及测量控制方式
该检测装置主要包括测量与控制系统、数据采集系统、计算机处理系统等。基本结构如图2所示。

图2 系统的基本结构示意图
2.1 测量与控制系统
测量与控制系统是检测装置的核心部分,主要包括测位传感器、测量操作控制面板。
测位传感器包括激光传感器、涡流传感器及编码器。激光传感器采用检测范围为60~140mm,分辨率为0.01mm的PSD型位移传感器;涡流传感器采用工作可靠性好、灵敏度高、抗干扰能力强、非接触测量、响应速度快的电压型位移传感器;编码器采用11位绝对式编码器,提高对现场环境的抗干扰能力。另外,在安装激光传感器时为避免复杂的轮对外表面对测量的不良影响,让激光传感器倾斜一定角度,使其轮对反射面的反射角变小,尽量让漫反射光进入到接收器中,基本满足接收传感器对光通量的要求,这样可以大大提高测量精度和可靠性。
控制系统主要由测量操作控制面板与 PLC 控制系统组成,采用两者相结合的方式控制数控车床二维滑台运动,带动各传感器进行数据扫描,并将扫描的数据传输给数据采集系统。测量操作控制面板采用 AT89C51 单片机作为处理器,将各种操作信息通过 PCI 型 I/O 数据采集卡传入工控机。工控机采用研华IPC-610机箱,PCA-600LV 主板。工控机的测量软件对传入的数据及控制信号进行处理,并将处理结果传递给数控车床 PLC,由 PLC 控制数控车床二维滑台运动,实现车辆轮对的检测与自动镟修。
2.2 数据采集系统
数据采集系统是检测装置的核心部分,主要包括模拟量的采集、数字量的采集、以及数字量控制信号的输入输出等。模拟量的采集采用 PCI 型250KS/s16位 A/D 转换的数据采集卡,用于对激光传感器、涡流传感器输出信号的采集。激光传感器、涡流传感器输出的模拟信号经各自的放大器放大后直接输入 A/D 数据采集卡的模拟输入端口上,经数据采集卡 A/D 转换后从 PCI 总线输入工控机。数字量的采集采用 PCI 型96路TTL数字量 I/O 数据采集卡,用于对编码器输出信号的采集,同时也用于控制信号的输出。为了减轻工控机的工作负担,每个编码器的输出都由一个 AT89C51 单片机数据处理板对其输出信号进行预处理,输出数控车床的实时绝对位置,再由工控机通过I/O 数据采集卡从 PCI 总线读入。
2.3 计算机处理系统
计算机处理系统包括测量控制、数据处理、数据传输等。测量控制主要是工控机接收测量操作控制面板传入的控制信息,并输出相应的控制信息给测量操作控制面板。数据处理主要是各传感器输出的模拟信号经高精度 A/D 转换后,输入到计算机进行数据存储、数字滤波和进一步数据融合处理,最终将处理的数据结果显示在控制测量软件操作界面的相应位置上,供操作人员查看。并将测量的结果数据进行存储及打印。数据传输主要是工控机将测量的结果数据传输给数控车床的 PLC 控制系统,指导数控车床对车辆轮对的镟修。
- 第1页:工控机在数控车床检测装置上应用(1)
- 第2页:控制测量软件设计
- 上一篇文章:数控机床RS422通信口及与RS232C的连接
- 下一篇文章:基于UG的波形弹簧冲压模具数控加工