



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于ARM开放式数控系统研究
2 基子ARM的数控系统的硬件设计
在上面建立的基于ARM的PCB工数控系统的总体设计的基础上,下面介绍主要的系统硬件部分的元器件、设备等的选型与设计。
2.1 ARM处理器的选择
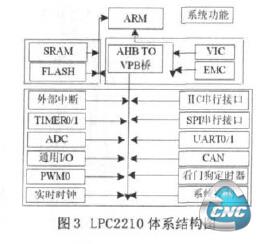
基于ARM体系结构的3啦系统占领了2位嵌入式系统的大部分。但长期以来,基于ARhr体系结构的32位系统仅在嵌入式系统的高端等场合使用,要么以专用芯片的面貌出现,要么以微处理器的面貌出现,并没有出现性价比高的通用微控制器。本文采用性价比高的LPC2210芯片,如图3为LPC2 210本系结构图。
2.2 运动控制器与ARM的连接
SNf5004是以单一芯片而可控制毖嫩的脉冲序列输入之伺服马达、步进马达的运动控制芯片,可以进行各轴独立的定位控制、速度控制,另一方面亦可在4轴中任意的选择2轴或是3轴来进行圆弧、直线、位方式插补。
SM5004云动控制芯片能与8/16位立数据总线接口,通过命令、数据和状态等寄存器实现4轴3联动的位置、速度、加速度等的运动控制和实时监控,实现直线、圆弧、位元琳模式的轨迹插补,输出脉冲频率达4MHZ。每轴都有伺服反馈输入端、4个输入点和8个输出点,能独立地设置为恒速、线性、非对称S曲线加/减控制、非对称梯形加/减速控制方式,并有2个32位的逻辑、实际位置计数器和状态比较寄存器,实现位置的闭环控制口在同等的性能指标下SM5004的价格远低干同类产品,因此本课题选用SM5004实现运动控制功能。
2.3 FLASH与ARM的连接
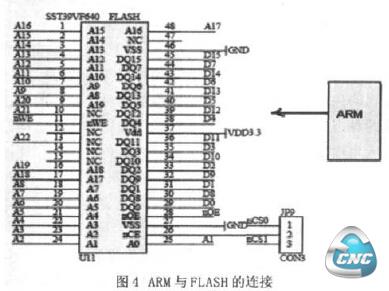
根据系统的功能要求,uClinux和应用程序编译后的内核大约为3.1M左右,因此选择4M的SST39VF640型FLASH。FLASH连接电路如图4所示。
2.4 ARM与EEPROM的接口
EEPROM是非易失性存储器,所以系统用它来存储一些断电需要保护的参数以及刀具尺寸、寿命、刀号、刀具进刀率等参数。系统采用ATMEL公司的IIC妾口的EEPROM。
2.5 以太网接口与ARM的连接
SMS9113同时具备MAC层和PHY物理接口功能芯片,它使用中断通知LPC22l嗽据的发送和接收。LPC2210是使用nGCSI和数据地址线访问SMSC911拍勺内部寄存器和缓冲区。TS6121是隔离变压器,板上的LED和LED指示灯分别表示100Mb/s链路正常和网络接收发送。
- 上一篇文章:基于华中数控系统宏程序的凸轮轴数控加工
- 下一篇文章:基于FAGOR CNC070数控系统的砂轮摆动磨削实现