



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

五轴联动数控加工中心仿真系统开发应用
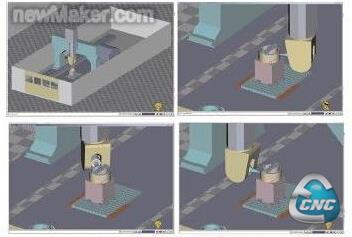
(4)机床主机构模型运动关系设置。
机床框架主结构模型运动关系说明:以工作台和主轴存储箱为固定基准,其中X轴部件、Y轴部件和Z轴部件为线性运动,C轴部件为旋转运动±360°,A 轴部件为±110° 摆动,建立运动约束关系。同时按编制的FOREST-LINE五坐标数控机床文件(FOREST-LINE.mch 文件),模拟机床实体机构运动过程,机床的空间运行状态同步显示如图4。
设置机床仿真系统工作行程软边界:X 轴、Y 轴、Z 轴、C 轴和 A 轴工作行程的上下边界如图 5 所示。
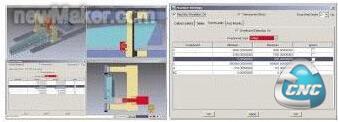
其中,图5所示为在执行蒙皮成型工艺装备五轴联动划线时,Z向超过行程,则仿真系统显示机床 Z 向运动机构为红色报警。执行蒙皮五轴联动划线和钻孔加工时,工艺实施要考虑到空间位置的 X 轴、Y 轴和 Z 轴,包括 A 轴和 C 轴的角度运动行程状态,此时仿真系统可显示机床 X 轴、Y 轴、Z 轴、A 轴和 C 轴中任意运动机构过行程红色报警提示。
(5)零件模型、模锻件模型与夹具模型定位仿真加工。
在仿真控制系统结构树内填加夹具(Fixture)和毛坯(Stock)联接树结构接口,分别定义空间位置并进行位置装配约束,进行调用拼装组合夹具定位(图6) 或模锻件定位(图7)加工。
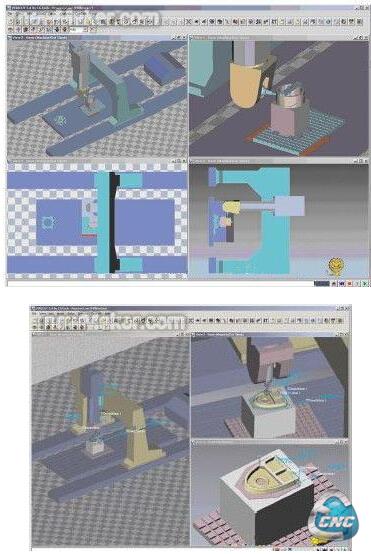
应用说明:夹具(Fixture)联接结构树接口可以直接读取,其中专用工装夹具可以与公司产品相应工艺装备文件连接。标准组合夹具可以直接调用拼装夹具标准件库,然后在仿真系统内组合装配应用。
(6)机床附件数学模型定义。
在刀具库(图8) 当中建立读入功能,这样有利于多人模板化应用,从而经过积累形成刀具参数库(GYTOOL.tls 文件),仿真系统内存有的刀具参数库需按实际刀具几何特征添加。刀具的分类一般按功能定义:铣刀、中心钻、钻和镗刀。
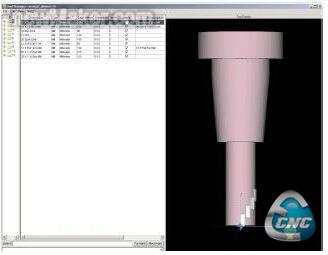
仿真加工中心刀具数据参数库可以按加工工件材料和刀具几何结构功能特征分类,采用数据库优化管理所使用的刀具。
- 上一篇文章:数控系统智能加工功能在大型精密模具制造中的应用
- 下一篇文章:伺服电机系统常见故障及维修