



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

单转台四轴数控机床虚拟样机的虚拟加工实现
转角C是工件(工作台)相对刀具的转动角度,以顺时针方向为正方向。将刀轴矢量γ绕Xk轴沿顺时针方向转动角C到与Zk坐标方向一致,如图3所示。这样就完成了刀轴矢量的转换,即刀具相对于工作台的转动。对于单转台四轴数控机床,为实现以上转换,工作台回转轴顺时针转动角C。
角C的计算公式:
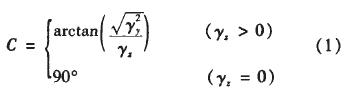
2.2.2 机床运动坐标x、y、z的计算
在0penGL中对物体的旋转、平移和缩放都是对坐标系的操作,而不是对虚拟物体本身的操作。在虚拟加工过程中,虚拟工件旋转时,虚拟工件相对于加工坐标系的位置是没有变化的,刀具的坐标不断发生变化。通过下面的方法,可以解决如何将旋转工作台的旋转角度影射到刀具位置的变化,即求刀具参考点(xk,yk,zk)经工件(工作台)转动后在机床加工坐标系中的位置坐标(机床的运动坐标X、Y、Z)。
刀轴矢量绕机床加工坐标系OlXlYlZl中的Xt轴旋转角C,变换矩阵为:
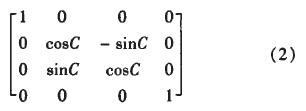
则
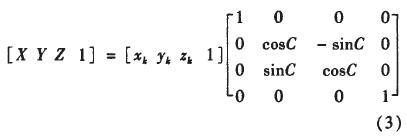
将式(3)展开可得:
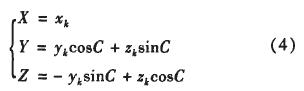
该数控机床的运动坐标X、Y、Z是刀具相对于机床加工坐标系OlXlYlZl的坐标,也就是说,运动坐标X、Y、Z是在机床加工坐标系OlXlYlZl下的坐标,这是本步计算的依据。
2.3 材料去除过程仿真
数控加工三维仿真是在工业图形标准应用程序接口OpenCL的基础上进行开发的。根据数控机床加工的高实时性及交互式的特点,该系统采用实时动画方式。实时动画是一边计算一边在计算机终端上直接产生动画,其交互能力强,可以根据用户的要求实时改变画面,但对计算机的图形处理能力要求较高。在实现动画的过程中采用了双缓存技术(或称虚屏技术),即后台缓冲区执行命令绘制图像,绘制结束后,利用重画技术,通过交换缓冲区,将后台缓冲区绘制的图形直接送到前台缓冲区中动态显示图形,这样就增强了数控机床加工过程三维动画显示的连续性和运动感。
该过程可以实现以下功能:
(1)生成已加工工件,用于加工质量的预测和误差补偿;
(2)获取切削参数,用于切削参数优化;
(3)计算每一刀的走刀路径,存入有效刀具路径报告,用于刀具轨迹的优化。
2.4 运动仿真和碰撞检测
碰撞检测主要检验刀具相对于非加工部件如夹具、工件的非加工部位和工作台的干涉现象,也可用来检验由用户指定的物体之间的干涉现象。由于楼梯扶手弯头的加工过程通过数控程序驱动,所以对发生碰撞和干涉的程序段可以及时修改。进行干涉的定性检查采用基于规则实体表面网格化遍历的八叉树单球组合模型的方法。
3 结语
数控机床虚拟样机是数控机床开发研制的一种全新的设计方法。为分析数控机床在加工时的性能情况,在数控机床虚拟样机上进行虚拟加工。系统主要具有以下优点:
(1)实现空间曲线加工过程的虚拟仿真。研究在四轴联动情况下,由一个转动坐标和三维空间的三个移动坐标相配合,准确描述空间曲线的加工方法;
(2)采用粒子群算法保证优化的效率。采用粒子群优化算法,避免了遗传算法的交叉、变异等导致运算效率低的缺点,又保留了进化算法的适用范围广、鲁棒性能好等优点;
(3)充分利用了虚拟加工技术的优点。基于虚拟加工技术,不仅保证了加工仿真的“真实性”,而且能够对加工过程中的超程、碰撞干涉进行检测,实现了对数控程序的全方位验证。
- 上一篇文章:西门子802数控系统的机床数据保护方法
- 下一篇文章:基于ARM和CPLD的开放式数控系统设计