



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于RTOS的伺服压力机数控系统
其中,运动控制任务具有最高优先级,而界面显示任务的优先级最低。FIQ中断不受μC—OSⅡ的管理,本文用于处理光电检测事件,它具有最快的响应速度。IRQ中断受μC—OSⅡ管理,分配给急停按钮按下,一般故障发生等事件,可获得仅次于FIQ中断的响应速度。
各个任务以及中断处理程序间的关系如图3所示。
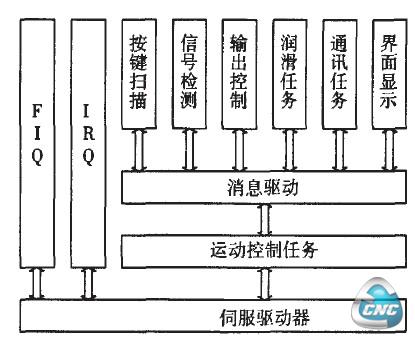
图3各个任务间关系组织图
运动控制任务负责伺服驱动器的初始化与控制。根据编译好的指令序列,向伺服驱动器发送控制信号,进而控制伺服电机的转速与位置。该任务实时性要求最强,分配最高的优先级。
按键扫描任务负责查询用户操控面板上各个按钮与开关的状态,每当检测到按钮或开关的状态有变化,就向有关任务发送按键改变消息。
信号检测任务负责压力机各个传感器检测信号的检测,一旦检测到有故障发生,就向相关任务发送消息。
输出控制任务根据当前压力机配置参数以及接收到的消息负责各个液压泵的开启与关闭操作。
润滑任务根据当前润滑参数定时发送润滑泵的控制信号到输出控制任务。
通讯任务负责与网络上其他控制器进行通讯,可实现远程参数设定,远程监控,故障诊断等功能。μC—OSⅡ本身并不具备网络功能,可以通过加载第三方代码,如μC/IP实现网络功能。
界面显示任务负责定时刷新LCD显示。界面显示并非紧急任务,安排最低的优先级。
3.5 界面设计
数控机床上,良好的人机界面操作简单、有效,且具有引导功能,会使用户感觉愉快、增强兴趣,从而提高使用效率。
μC/GUI支持窗口控件机制,运用窗口管理和回调机制,运用窗口控件函数,可以在LCD屏幕上实现类似于Windows的界面。基于μC/GUI的绘图操作并根据数控伺服压力机的操作特点,设计了伺服压力机的操作界面,主要包括主操作界面、参数设置界面、系统配置界面、帮助界面等。图4为伺服压力机数控系统运行主界面。
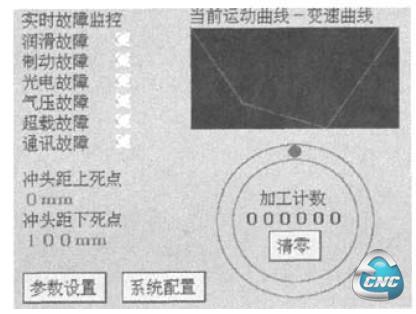
图4伺服压力机运行主界面
4 结语
基于RTOS的伺服压力机数控系统具有如下特点:
a)运动曲线可变,适合于不同冲压工艺要求;
b)具有低振动、低噪音、高效率、高精度等特点;
c)采用了μC—OSⅡ操作系统,保证了系统的实时性与稳定性;
d)网络功能的集成可满足现代化网络制造的需求;
e)操作界面简单实用、提高使用效率。
目前,实时系统已经广泛应用于航天、通讯、工业控制等行业,将μC—OSⅡ和μC/GUI应用于伺服压力机的数控系统是较理想的选择。
- 第1页:基于RTOS的伺服压力机数控系统(1)
- 第2页:软件设计
- 第3页:界面设计
- 上一篇文章:电火花数控线切割加工工艺的数控技术探讨
- 下一篇文章:基于PLC-伺服驱动的位置控制系统设计