



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

PLC在变频闭环调速系统中的应用
④调节偏置电位器,并读取和修改模拟量输入映像寄存器AIW相应地址中的读数,使该读数值为零。读取模拟量输入映像寄存器AIW中的数据可使用PLC程序来完成,参考程序如图2所示。
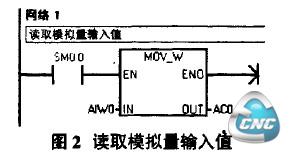
通过STEP7/一Micro/WIN编程软件监控,可观察AIW中的数据是否为所需值。
⑤将一个满刻度信号加到模拟量模块输入端,调节增益电位器直到读数为32000。
2.1.4旋转编码器旋转编码器是用来测量转速的装置,光电式旋转编码器通过光电转换,可将输出轴的角位移、角速度等机械量转换成相应的电脉冲以数字量输出(REP o它分为单路输出和双路输出两种。技术参数主要有每转脉冲数和供电电压等。单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组A/B相位差90度的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。
2.2 系统电气接线原理如图系统电气接线原理如图3所示。
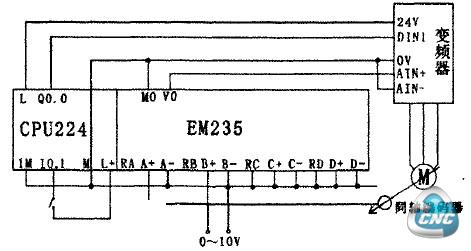
图3系统电气原理图
图中旋转编码器的转速输出端(输出0V~5V电压)与EM235模块的电压输入端A+和A-相连接,将直流给定电源的输出端(输出电压范围0V~IOV)与EM235模块的B+和B-相连接,作为给定量输入值。经PLC处理后的数据由EM235模拟量输出端子送到变频器的AIN+和AIN一脚。在电路系统中,为保证正常运行安全,必须将设备可靠的接地,因此,变频器的接地端也应可靠接地。
3 系统软件
在该闭环调速系统中,软件设计主要是指PLC程序设计。PLC程序设计的主要任务是接受外部开关信号(按钮)的输入和两路模拟量输入(即给定量和反馈量),对模拟量输入数据进行标准化整定,并完成PID运算,并将运算结果进行整定后,由模拟量输出端子送出。参考程序如图4所示。
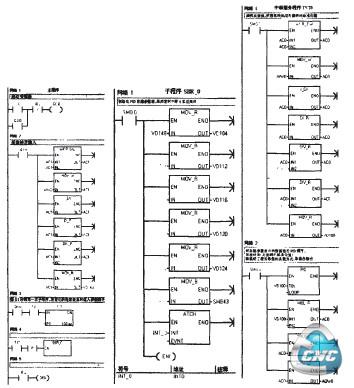
图4基于PLC模拟量的变频闭环调速系统参考程序
4 控制系统设计及实施时注意事项
4.1 变频器在启动时,给定电压应以~定的斜率由0逐步达到设定值,以实现软起动的功能,减小起动电流对电网的冲击,节约电能。但在启动阶段不能进行PID调节,以防出现震荡。
4.2 用PLC组成闭环自控系统,在实现自动调节的过程中,为防止PIE的扫描周期的影响,PLC运算应采用定时中断的方式,定时中断的时间周期,可根据系统的调速指标和控制精度来设定,同时还需要考虑系统在加给定到系统运行输出的时间延迟。
4.3 在使用EM235模块时,要根据输入信号范围对其输入信号进行整定。
4.4 在本系统中,PID运算虽然是由PLC内部编程的形式(即PID回路指令)实现的,但一定要注意比例系数、积分时间和微分时间的设置,过程量参数在写入参数表时的标准化处理以及运算结果工程量处理。
5 结束语
由PLC、变频器和旋转编码器实现三相交流异步电动机变频闭环调速控制系统,具有结构简单,配置灵活,良好的软启动性能及带负载能力等特点。其动态性和稳态性均能满足高性能要求的生产场合。不仅可以获得相当的控制精度,而且还可以获得更高的可靠性和更强的抗干扰能力,满足了高稳定性和快速性要求,经济效益显著。若生产需要,本系统也可方便接入DCS或上位机,建立人机界面的监控系统等。目前此模式下的调速系统,已广泛的应用于工业生产及日常生活中,如:PLC控制的空压机变频调速系统、基于PLC的变频恒压供水系统、PLC变频调速系统在物料搅拌系统中的应用等等。此技术值探讨和推广。
- 第1页:PLC在变频闭环调速系统中的应用(1)
- 第2页:系统软件
- 上一篇文章:用FANUC数控系统实现主轴任意位置的定向功能
- 下一篇文章:高速铣削与数控技术编程