



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

数控技术:模糊自适应PID在数控进给伺服系统的应用
2.3 建立Fuzzy-PID系统结构仿真框图
根据常规的PID控制器增量算式结合(1)、(2)、(3)式,即可在MATLAB/Simulink环境下建立起PID的仿真子模块,如图4所示,并封装成子系统PIDSubsystem。模糊控制器及其封装仿真模块如图5所示。把模糊控制器和PID控制器封装在一起,组成Fuzzy—PID控制器,如图6所示。
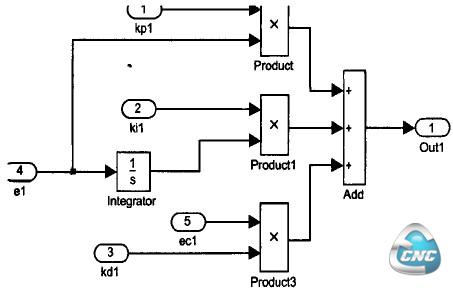
图4 PID仿真子模块

图5模糊控制器及其封装
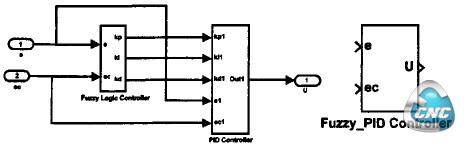
图6模糊自适应PID控制器及其封装
3 系统仿真
选择某数控机床的z向进给伺服系统为研究对象,工作台质量m=3500kg,丝杠导程L=0.0012m,丝杠总长l=0.963m,丝杠支承轴向刚度KB=1.12*108N/m,丝杠螺母的接触刚度KN=2.02*108N/m。采用西门子电机型号为IFKl602,电机转动惯量J=0.01323kg·m2。根据以上参数确定机电耦合系统的传递函数,建立系统的模糊自适应PID控制的Simulink仿真计算图,如图7所示。
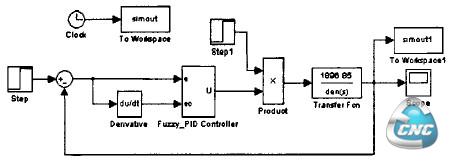
图7系统模糊自适应PID控制的Simulink仿真
取量化因子ke=0.2,kec=0.1,解模糊因子k1=0.5,k2=0.01,k3=0.01,令PID控制器3个初始值Kp'=16.4,Ki'=0.3,Kd'=0.5,仿真时间40s,加单位阶跃信号图6是常规PID控制曲线图和模糊自适应PID控制曲线图。仿真结果表明,此方法较常规的PID控制,由于模糊控制器能够根据系统误差e和e.误差变化率对三个参数△Kp、△Ki、△Kd进行在线修正,所以得到的系统动态响应曲线较好,超调量小,稳态精度高,更好的适应性和鲁棒性。
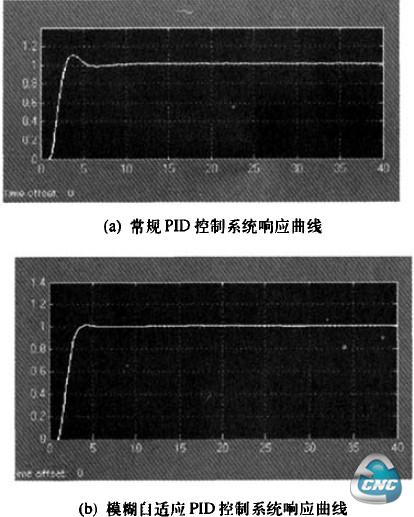
图8控制性能比较
4 结论
本文介绍了基于模糊控制的伺服控制系统的基本结构,并详细分析了各组成部分的机理,在此基础上,将模糊PID控制应用于考虑机电耦合效应(包括机械进给环节)的数控伺服系统中,该控制器可以根据测量得到的偏差及偏差的变化率,在线自动整定PID控制器的3个参数,并在MATLAB环境下进行了仿真,仿真及实验结果表明,自适应模糊位置控制器具有良好的稳态精度和动态响应。
- 第1页:数控技术:模糊自适应PID在数控进给伺服系统的应用(1)
- 第2页:系统仿真
- 上一篇文章:基于神经网络的数控技术线切割加工状态建模技术研究
- 下一篇文章:数控技术领域切削加工的数字化测量技术与分析