



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

数控技术在弧焊机器人系统中的应用
2.3 多轴联动实现复杂曲线焊缝的焊接
数控机床最突出的优点是:可以根据编程,加工出较为复杂的曲线,比如圆、抛物线等。数控机床能加工出复杂的曲线。必须是多轴联动,现代数控机床往往是刀具固定在一个位置,工件做相对于刀具的运动。同样的道理,弧焊机器人与变位机之间。我们可以类比焊枪就是数控加工过程中的刀具,待焊焊缝就好比待加工工件。这样将会大大简化机器人模块和变位机模块。
由图2我们可以看到数控机床的刀具正在加工复杂曲面。在其工作过程中,数控刀具与待加T曲面之间必然有相互运动的耦合。而这种耦合是通过数控程序控制的,数控技术目前是非常成熟的。这对于机器人工作站的研发有很强的指导意义。

图2数控机床正在加工复杂曲面
2.4 弧焊机器人控制下焊枪的运动
现代工业机器人模块(图3),功能已经相当强大,能够加持焊枪多角度转动,与变位机之间的耦合也是非常容易实现。
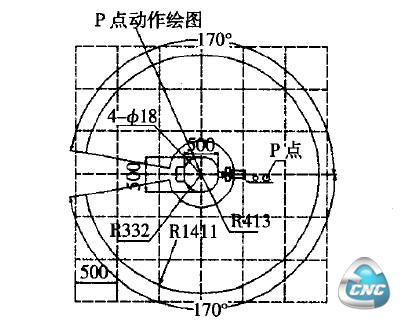
图3 机器人模块头部的运动范围
机器人模块控制焊枪可以很大范围地运动,更加有助于实现与变位机的耦合与解耦。数控技术在焊接中的应用是随着国外进产品技术发展起来的。同时,国内焊接技术的发展也会促进数控技术在焊接中的应用。
3 数控技术控制弧焊机器人系统协调运动举例
如图4所示,一个椭圆形焊缝,如果变位机夹持待焊工件,应用数控技术中的宏程序编程即可轻松解决复杂焊缝的焊接问题。
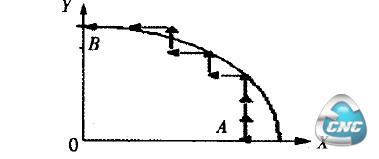
图4椭圆状焊缝
椭圆加工在数控技术中的编程思路:以一小段直线代替曲线,逐点趋近的方法来完成椭圆焊缝的焊接。
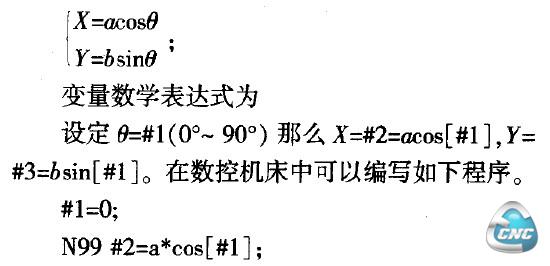
1/4椭圆焊缝轨迹线加工方法:已知椭圆的参数方程为
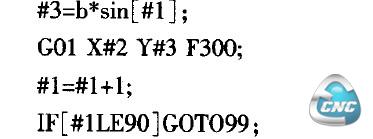
此程序可以在变位机相对静止的情况下,弧焊机器人完成椭圆曲线焊缝的焊接。
4 结论
综上所述,数控机床技术在变位机中的应用,更好地促进了弧焊机器人与变位机之间的运动协调关系。虽然我国尚未制定出焊接变位机的设计规程,但是成熟的数控机床设计规程可以作为指导,为现代工业生产大大节约了时间、空间,特别是在车辆、船舶制造方面,使得工作在不同制造单元之间的周转运输效率大大提高而成本费用不断降低。
- 上一篇文章:数控技术在电气工程中的应用分析
- 下一篇文章:四轴三联动数控技术在模膛加工中的应用