



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

镗床专用机械手PLC控制系统设计
2 系统的软件设计
2.1 总程序结构
机械手有手动和自动两种工作方式, 由万能转换开关SA1选择。在手动操作方式下, 各种动作都是用按钮控制来实现, 其控制程序可单独设计,与自动工作方式控制程序相对独立。因此总程序设计成两段独立的部分: 自动操作程序和手动操作程序。其结构框图如图3 所示。当选择手动操作方式时, 输入点X015 接通, 其常闭触点断开, 执行手动程序, 并且X016 常闭触点闭合, 则跳过自动程序段。若选择自动操作方式, 则跳过手动程序,执行自动程序段。
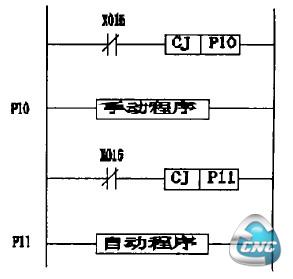
图3 总程序结构框图
2.2 手动操作程序设计
手动操作主要用于检修调整, 通过按钮对机械手的每一步动作进行单独控制。例如, 当选择小臂伸/缩运动时, 按下启动按钮, 小臂伸出; 按下停止按钮, 小臂缩回。其它动作以此类推。这样, 其控制较简单, 可按照一般继电器控制系统的逻辑设计法来设计。
为了安全起见, 程序中设置了联锁保护。例如, 只有大臂竖立时小臂才能上/下摆动, 因此小臂上/下摆动用大臂上限条件作为联锁保护。还有小臂处于上限位时, 才允许大臂上/下摆动; 小臂伸出时料架不能转位。另外, 由于大、小臂和手腕、手指的运动都采用双线圈三位电磁阀控制, 两个线圈不能同时通电, 因此在其电路中设置互锁环节。
2.3 自动操作程序设计
在正常运行时, 机械手处于自动操作方式。深孔镗床在加工零件时, 机械手大臂竖立、小臂伸出并处于水平、手腕横移向右、手指松开, 即处于原始位置, 原点指示灯亮。加工完毕后, 按一下启动按钮SB1, 机械手动作顺序为: 原始位置( 大臂竖立、小臂水平且缩回、手腕横移向右、手指松开) →手指夹紧( 抓住卡盘上的工件) →手腕横移向左( 从卡盘上卸下工件) →小臂上摆→大臂下摆→手指松开( 将工件放在料架上) →小臂缩回→料架转位→小臂伸出→手指夹紧( 抓住待加工的工件) →大臂上摆( 从料架上取走工件) →小臂下摆→手腕横移向右( 把工件装到卡盘上) →手指松开( 原位) 。机械手完成一个自动循环后处于原始位置, 然后深孔镗
床开始加工。待加工完毕, 再按启动按钮, 机械手又重复上述动作。这是一个典型的按顺序动作的步进控制系统, 可用PLC 的步进指令编程。
3 结束语
用可编程控制器设计的机械手电气控制系统,线路简单, 系统的可靠性高, 功能强, 整个系统运行稳定、精确。同时还可根据需要对其进行功能扩展, 如与自动化机床联合控制, 可组建自动化生产线。
- 第1页:镗床专用机械手PLC控制系统设计(1)
- 第2页:系统的软件设计
- 上一篇文章:高性能交流伺服系统中的控制方法
- 下一篇文章:基于ARM三轴伺服控制系统的人机界面设计