



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于PLC和交流伺服的单轴控制系统
3 人机界面设计
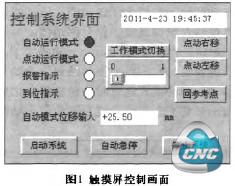
系统以西门子TPl77B触摸屏作为人机界面。该触摸屏基于Windows CE操作系统,具有2M用户存储器,内部集成有RS422/485、USB和Profinet/以太网接口。组态后,能方便灵活地设定控制参数,实现对运行状态的实时监控。
为实现触摸屏与主站PLC的数据通信,需要对触摸屏进行组态设计。本文利用Wincc Flexible2005对触摸屏进行组态,触摸屏通过变量访问主站PLC相应的存储单元。MPI网路适用于小范围、通讯数据量不大的应用场合,并且S7-300CPU中带有MPI接口,因此本系统使用该通讯方式作为人机界面与主站S7-300之间的通讯。
打开该组态软件,新建一项目,HMI设备选为TPl77,接口选IFBl口,控制器为S7300/400。按照触摸屏在系统中的使用要求,完成画面设计,画面主要有工作指示灯、工作模式选择、位移量输入等模块。画面编辑完成后配置连接参数,在HMI设备配置栏中,类型选为Simatic,波特率187500,地址设为1,勾选总线上的唯一主站项;网络配置栏中,将配置文选为MPI,主站数目为1;PLC设备中地址设为2,对应主站PLC地址。连接参数配置完成后,按照表1的分配地址新建变量。在起始画面中,将各操作模块与对应功能的变量进行连接。组态完成后利用一条标准交叉网线把PC与触摸屏连接,配置PG/PC口为PCAdapter(MPI),设置PC与触摸屏通过MPI方式进行项目下载。所设计人机界面如图1所示。
4 主从站DP通讯设计
Profibus-DP作为一种开放式的现场总线协议,在工控系统中得到了广泛的应用。该协议仅使用了ISO,OSI参考模型中的第1、2层和用户接口,精简的结构保证了数据的高速传输,非常适用于PLC间的数据通信。在该系统中,主站S7-300主要用于通信服务。数据通信开始阶段,主站首先通过MPI通讯网络接收人机界面的控制指令,然后通过Profibus-DP总线将指令送到从站,同时接收来自从站的运行状态等反馈信息。硬件连接上,S7-200cPU通过EM277连接到总线网络上。作为DP从站模块,EM277接受来自主站的I/O配置,向主站发送和接收不同数量的数据。主从站DP通讯过程中,主站将其输出区的信息发送到从站输出缓冲区,与从站交换数据:从站将其输入缓冲区数据返回给主站输人区,以响应从主站来的信息。
4.1 组态设计
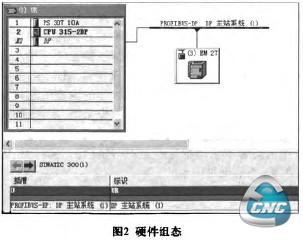
在SIMATIC Manager中创建一新项目,插入一个SIMATIC 300站点。打开HW config编辑器,按订货号依次插人机架、电源和CPU。在Profibus组态画面中,新建一个DP网络,将通讯地址设为2,传输速率设为187.5Kb/s,配置文件选为DP。主站PLC可自动识别人机界面,不需进行组态。S7-200通过EM277模块连接到Profibus-DP上,从站组态实际是对EM277进行组态。组态前先将EM277的描述文件siem089d.gsd添加到STEP7中,设置从站地址为3(与EM277拨码开关一致)。组态设置通讯接口为4字节输入,4字节输出,V区偏移量设置为80,则主站发送区PQB20-PQB23对应从站接收区VB80-VB83,主站接收区PIB24-PIB27对应从站发送区VB84-VB87。系统硬件配置组态完成后,将硬件信息下载至S7-300中。硬件组态如图2所示。
4.2 用户程序
在CPU315-2DP符号表中,定义数据块DB1用于存放接收和发送数据;功能调用FCl用于CPU300与200之间的数据通讯交换。OB100用于初始化数据映射输入与输出存储区。主程序在组织块OBl中执行,初始化组织块OB100执行后,OB1被循环的进行处理。在循环的结尾,将过程映像输出表发送给输出模块。通讯过程中,可通过变量表来查看通讯效果。主站程序插入了I/O访问故障诊断模块OB82、机架故障诊断模块OB86,用于对相应动作的操作说明。
5 运动控制设计
系统工作中,不同控制模式的切换应在电机停止状态下进行。为保证系统运行安全,在自动与点动、电机正反转等动作问应加人互锁功能。运动控制程序在S7-200PLC中编写。编程时对不同动作,如自动模式、点动模式和回参考点(复位)等动作,分别编写了相应子程序,由主程序OBl调用。子程序的启动由S7-200PLC输入点或触摸屏辅助继电器信号进行选择。
5.1 自动模式
系统硬件连接中,编码器反馈脉冲接到驱动器,构成一个半闭环定位控制系统。当偏差滞留脉冲(PLC输出脉冲与编码器反馈脉冲差值)小于参数设定值时,驱动器向PLC输出脉冲定位完成信号,同时PLC中定位完成标志V18.2置1。自动程序设计中,首先要将触摸屏端的运行参数转为相应脉冲敛,然后由PLC输出该数目的脉冲到伺服驱动器。S7-200 PLC集成有两路20kHz高速输出口,自动模式下,系统利用PLS指令,从Q0.013输出PTO脉冲。PTO输出模式下对应控制字节单元为SMB67,程序中向该寄存器中写入16#85,对应功能为:选择PTO模式:允许脉冲输出:单段操作;微秒时基;发脉冲周期与个数异步更新。为避免扫描周期对脉冲发送过程产生影响,每次脉冲发送完后,系统产生一次中断。当需要系统紧急停止时,可通过向SMB67中写入控制字16#CB来停止脉冲输人。考虑到S7-200的脉冲发送频率限制,设计电机以800r/m速度运行,在驱动器电子齿轮比设置中,将输入脉冲倍频数设为1O,分频数设为1,对应参数号分别为Pr34和Pr35。伺服电机自带编码器经4倍频后,分辨率可达10000胍,电子齿轮比设置后,可实现驱动器每接收1000个脉冲电机旋转一周,PLC脉冲发送频率低于最高值。
5.2点动模式
点动模式下,系统选择驱动器工作在速度模式,电机按驱动器内部设定速度运行。运行点动模式时,为避免自动、点动间的信号影响,首先要通过驱动器X3输入点,进行驱动器混合模式切换。系统中只使用一个内部速度,即点动模式下,控制电机以单一速度运行。设计电机以2000r/m的速度运行,加减速时间设为500ms,由参数号Pr24设置得到。
5.3 回参考点
伺服控制系统中,复位功能可一定程度上减小由系统惯性、脉冲丢失、丝杠与机械构件间的联接空隙等因素带来的运动控制偏差。本系统中,参考点设置在丝杠中间位置,复位功能由系统编程实现。参考点处设有接近开关,其两端分别设置机械传感器,位置反馈信号接至S7-200端。系统复位过程描述如下:当参考点两侧的机械传感器检测到工作台经过时,反馈信号由高电平跳变为低电平,PLC内部置位。复位指令下达后,根据机械传感器信号,在PLC端进行电机转向判断,电机以回原点第一速度运行:碰到机械传感器下降沿时,电机改为第二速度慢速靠近参考点,碰到参考点接近开关时,电机停止,系统复位结束。
6 结束语
本文介绍的交流伺服系统以适应工业控制需求为出发点,融入了PLC、触摸屏和总线通讯,有较好的工程使用价值。系统通过触摸屏进行调节控制,使操作简单;利用PLC直接对伺服电机进行位置和速度控制,省略了定位模块,节约了成本。搭建的系统满足设计要求,运行可靠,取得了满意的效果。
- 第1页:基于PLC和交流伺服的单轴控制系统(1)
- 第2页:人机界面设计
- 上一篇文章:基于PLC与变频器的编织生产线自动控制系统
- 下一篇文章:数控一代关键技术之数控系统