

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

伺服驱动器模拟量速度指令自动调零方法及其实现
本文介绍了一种简便、实用、高可靠性的模拟量速度指令自动调零方法,通过在伺服驱动器控制软件的基础上,利用系统硬件和软件控制算法来宾现伺服驱动器模拟量速度指令的自动调零。
3 模拟量速度指令自动调零方法的实现
模拟量速度指令自动调零方法的最好实现方式的步骤为:
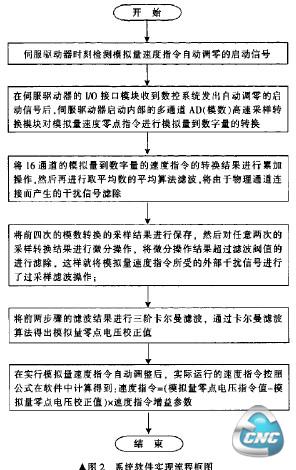
1)伺服驱动器时刻检测模拟量速度指令自动调零的启动信号;
2)在伺服驱动器的I/O接口模块收到数控系统发出自动调零的启动信号后,伺服驱动器启动内部的多通道AD(模数)高速采样转换模块对模拟量速度零点指令进行模拟量到数字量的转换:
3)将16通道的模拟量到数字量的速度指令的转换结果进行累加操作.然后再进行取平均数的平均算法滤波,将由于物理通道连接而产生的干扰信号滤除;
4)将前四次的模数转换的采样结果进行保存,然后对任意两次的采样转换结果进行微分操作.将微分操作结果超过滤波阀值的进行滤除,这样就将模拟量速度指令所受的外部干扰信号进行了过采样滤波操作:
5)将前两步骤的滤波结果进行三阶卡尔曼滤波,通过卡尔曼滤波算法得出模拟量零点电压校正值:
6)在实行模拟量速度指令自动调整后,实际运行的速度指令按照下述公式在软件中计算得到:速度指令=(模拟量零点电压指令值一模拟量零点电压校正值)×速度指令增益参数(3)系统软件实现的流程框图如图2所示。
4 结束语
伺服驱动器模拟量速度指令自动调零方法已在驱动系统中的应用实现,实施以来效果明显:为用户提供了方便,提高了系统的可靠性,同时使系统的成本也明显的下降了,具有良好的市场前景和应用价值。
本文为授权转载文章,任何人未经原授权方同意,不得复制、转载、摘编等任何方式进行使用,e-works不承担由此而产生的任何法律责任! 如有异议请及时告之,以便进行及时处理。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:FMS系统中上料机械手的PLC控制
- 下一篇文章:数控车间DNC与MES集成技术研究与系统开发