



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于PLC网络控制技术的珩磨机运动控制
2 PLC与伺服驱动器及变频器的通信
在该控制系统中,PLC与伺服驱动器及变频器间的通信是实施网络控制的关键。下面介绍通信的其体实现。
2.1 PLC与伺服驱动器的通信
在数据通信或网络控制时,MR-J3只能以从站的形式接入系统,因此,MR-J3只能接收主站的控制命令,并根据命令要求进行相关操作。MR-J3与PLC的通信过程如下:
① PLC执行通信程序,向驱动器发送控制命令。
②驱动器根据控制命令要求,进行数据读出或写人操作(通信处理),完成后向PLC返回执行结果数据(如返回读出的参数值或命令执行时的错误信息等)。
PLC通过其串行通信模块C24N与MR-J3系列伺服驱动器通信时应采用MR-J3的专用协议。该协议下的控制命令格式与执行结果数据格式如图2-3。
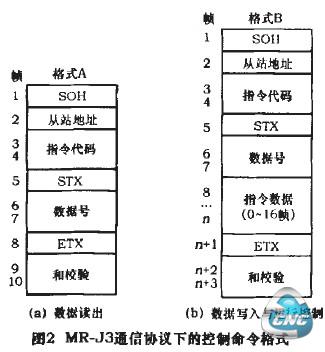

PLC执行通信程序,发送格式A、格式B形式的控制命令,接收格式C、格式D形式的执行结果数据,即可实现与驱动器的通信。其中指令代码规定了驱动器要进行的操作;数据号用于指定参数号、运行参数等;指令数
据为1-16帧,用于数据写人与运行控制命令,以发送参数值等;读出数据为驱动器内部工作状态数据或参数值;出错代码为命令执行时的错误信息。
鉴于PLC通信程序的编写与调试非常繁复,三菱电动机提供了用于配置C24系列模块的各种参数和进行可视化编程的软件包CX Cconfigurator-SC。所以进行参数设置及通信程序编制都是通过该软件的。编写PLC通信程序前,需先制作发送功能块与接收功能块。通过CX Configurator-SC软件包中的FB Support功能完成 PLC功能块的制作。发送功能块与接收功能块的制作具体有3步:
①控制命令格式与执行结果数据格式的制作。
按照驱动器通信协议规定的格式A、格式B制作发送数据帧格式;按照驱动器通信协议规定的格式C,格式D制作接收数据帧格式。
②控制命令内容与执行结果数据内容的制作。
按照格式A、格式B填人相应的发送内容〔数据或形参);按照格式C、格式D填入相应的接收内容(数据或形参)。
③发送与接收功能块的制作。
制作的功能块用于完成数据发送与接收。
根据珩磨机运动控制特点和工艺参数要求,发送数据主要用于实现电动机多段速度命令给定,接收数据主要用于电动机实际运行状态的读取。
最后分别对各功能块编译后就可以用其编制PLC通信程序了。
2.2 PLC与变频器的通信
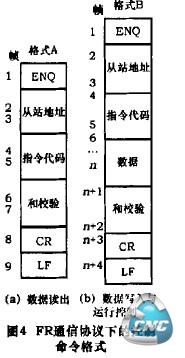
三菱FR系列变频器在使用本机自带的串口时可使用两种通信协议:三菱变频器专用协议和Modbus协议。三菱变频器专用协议的帧格式是完全公开的,本设计使用专用协议。由于在网络中FR也是作为从站,所以FR也只能接收主站的控制命令,并根据命令要求进行相关操作。FR与PLC的通信过程和MR-J3与PLC的通信过程相同,但其通信协议下的控制命令格式与执行结果数据格式与MR-J3的不同,其控制命令格式与执行结果数据格式如图4-5所示。

按照变频器的通信协议编写PLC通信程序,实现PLC与变频器的通信。如前所述,该通信程序的编写也是利用软件包CX Cconfigurator-SC中的FB Support功能,先制作发送功能块与接收功能块,再编写PLC通信程序。
3 结语
本文构建了基于RS-485的主从式控制网络。利用该网络中主站PLC可靠性高、抗干扰能力强、易于编程、能够实现网络控制等特点,通过控制网络完成对各伺服驱动器、变频器等的运行控制,简捷地实现了晰磨机的位置伺服控制。
该控制系统实施的控制方法简单方便,控制功能更加完善,同时利用触摸屏可以随时了解和控制加工过程与工艺参数,对各种故障的及时记录并报警,从而完全实现了形磨机加工过程的远程监控。
- 上一篇文章:基于PLC的烟草运输系统的设计与实现
- 下一篇文章:触摸屏与PLC控制的异型管锯管机的设计