



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于PC+NC的开放式数控系统平台的研究与应用
0 引言
对开放式数控系统的开发主要有3 种类型: PC嵌入型CNC ,NC 嵌入PC 型和全软件型。 第2 种类型是工业PC 机配合专用的CNC 卡(如运动控制卡) 组成,它能够充分地保证系统性能,是目前比较可行的一种开发方式。
1 基于PC + NC 的开放式数控系统平台的开发
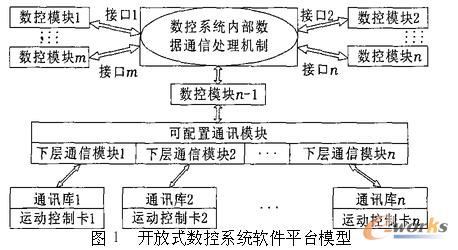
在系统平台建模时,通过对数控平台需求进行分析后,将数控软件抽象成一些功能独立、内聚强、相互间耦合松散的软件功能模块,并定义好接口,以便与其它模块通信。 根据其通信对象,模块间通信分2种:一种是数控系统软件中,各模块之间的内部数据通信,另一种是数控系统中,某些模块与底层运动控制单元的通信。
对于数控系统中各模块之间的内部数据通信,以数据通信为中心来进行开发,内部通信模块作为整个数控系统软件的中心模块,具有多个模块接口,通过这些接口可以与其它数控功能模块相连接。 每个模块的输入和输出,都通过模块与数据通信这个中心环境交互,数据交互环境自治地从各接口读取和发送数据,并将数据发送到各接口。
对于数控系统中某些模块与底层运动控制单元的通信,主要利用底层所提供的通信库来完成。 由于不同的底层运动控制单元所提供的通讯库不一样,而数控系统中某些模块必须使用相应的通讯库进行开发,从而导致数控软件对于底层运动控制单元有很大的依赖性,为了克服这种依赖性,将数控系统软件通讯模块按可配置的方案进行设计,此模块根据不同的底层运动控制单元,选择装载相应的通讯库,通过将不同的通讯库设计为通用的通讯类库,为系统中需要通讯的模块提供通用的API,提高上层数控支撑软件的硬件独立性,从而提高系统的开放性。系统软件平台方案如图1所示。
2 实例
作为开发基于PC + NC 开放式数控系统平台应用实例,我们采用了IPC + UMAC ,对大型螺旋桨用重型七轴车铣复合加工机床数控系统进行了开发。 在此系统中,采用开放式平台体系结构,上位机使用Win2000 操作系统,通过网络接口将UMAC运动控制器和工业控制计算机连接,采取HMI和实时控制分开的上、下位机结构,实现系统的开发。系统硬件建立在通用的工业PC(IPC) 基础之上,实质采用了多CPU 的分层控制结构, 每一层之间均通过标准的总线方式和开放的接口规范相连。
2.1 系统硬件设计
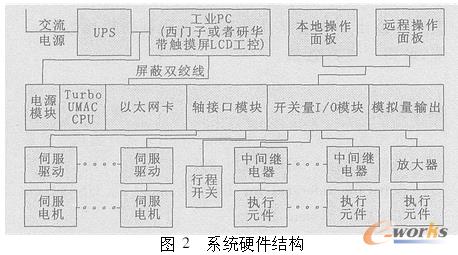
UMAC 是美国Dleta Tau 公司生产的一种运动控制系统,此系统可配置控制任何类型的机床自动化应用。 IPC 与UMAC 集成数数控系统的硬件结构按用户需求,根据系统需求选择电机、电机驱动及各种接口模块,通用图控2制 系统硬硬件件结结构构如图2 所示。UMAC(下位机) 主要完成如下功能。
a.通过UMAC 提供的位置捕捉功能,完成机床大型零件的在线检测,实现装夹找正、加工余量预估和对刀调整补偿。
b.通过UMAC 提供的数据采集及分析功能,完成数控系统所需的信号及参数, 实现对加工工件的跟踪扫描及远程操作控制。
c.使用UMAC 提供的电机参数调整功能,实现双电机消除反向间隙。
d.通过UMAC 提供的插补功能,完成各电机的运动控制。
e.通过UMAC 的I/ O 口,输入检测部件、行程开关等各种开关量输入信号。
f .通过UMAC 的I/ O 口,输出各种控制和指示信号。
UMAC 提供通用的网络接口和USB 接口,通过带屏蔽的双绞线或USB 信号线可实现UMAC与工控机之间的数据传输,220 V 的AC 电源经过UPS 后,给工业控制计算机和UMAC 供电,以保证在掉电后可以正常停机。 根据不同的伺服系统(数字或模拟) ,可选择相应的轴接口模块,各模块之间通过跳线设置其地址,以避免地址冲突。
- 第1页:基于PC+NC的开放式数控系统平台的研究与应用(1)
- 第2页:系统软件设计
- 上一篇文章:STEP兼容式数控技术加工研究进展
- 下一篇文章:基于MCX314控制器的机床数控系统设计