



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于PMAC的数控技术试验台PID参数整定
0 引言
PMAC运动控制卡是性能优越、通用的一种运动控制器,本系统利用PMAC2A—PCI04运动控制卡为主卡,Acc-1P为轴扩展卡进行5~8轴数控系统集成,并应用于五轴数控技术试验台。数控技术试验台的控制环对系统的影响是巨大的,为了使数控技术试验台获得良好的稳态特性和动态特性,必须对系统的控制环进行校正和调整。在工业自动化控制领域,PID控制算法一直起着非常重要的作用,解决了自动控制理论所要解决的最基本问题,即系统的稳定性、快速性和准确性。随着微电子技术及数字技术的不断发展,模拟PID调解器逐渐被淘汰,由数字PID取代,数字PID是由程序实现的,其控制的灵活性和准确性更高,是目前控制系统广泛采用的控制算法,当然,在不满足控制要求的情况下,数字PID控制算法还可以和其他控制算法组合使用。PMAC运动控制卡包含了数字式“PID+NOTCH滤波器”,为改善位置控制性能提供了便利条件。
1 PMAC运动控制器中的PID
PMAC作为一个全数字伺服系统,利用计算机的硬件和软件技术,采用新的控制方法改善系统的性能,可同时满足高速度和高精度的要求。该系统的位置、速度和电流的校正环节PID控制由软件实现;引入了前馈控制,实际上构成了具有反馈和前馈的复合控制的系统结构,使位置跟踪滞后误差大为减小,提高了位置控制精度。这种系统在理论上可以完全消除系统的静态位置误差、速度、加速度误差以及外界扰动引起的误差。PMAC提供了PID+速度//JD速度前馈+NOTCH滤波的控制环算法,根据系统的要求来合理地调整其中的相关参数,最终可达到系统所要求的性能,能够满足几乎所有场合的要求,用户可以根据自己系统的要求来调整其中的相关参数。除此外,PMAC也为用户的特殊要求提供扩展的伺服控制算法,并且支持用户自己编写的伺服算法(需要用户熟悉Motorola 56000系列DSP CPU的汇编语言)。PMAC控制算法的原理如图1所示。
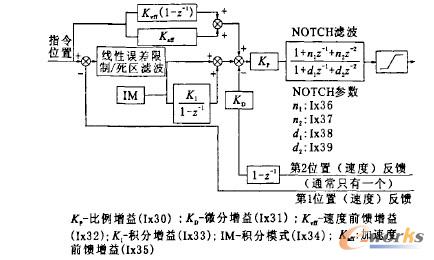
图1 PID+NOTCH滤波器
2 系统的PID参数整定
由于自动控制系统被控对象的千差万别,PID的参数也必须随之变化,以满足系统的性能要求。PID参数的整定可以用理论计算法和实验调整法,理论计算法往往不能满足控制要求,在工程上常常采用实验调整法。
2.1 PID参数整定的基本步骤
2.1.1 确定比例增益Kp
确定比例增益Kp时,首先去掉PID的积分项和微分项,一般是令K1=0,KD=0,使PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大Kp,直至系统出现振荡;再反过来,从此时的Kp逐渐减小,直至系统振荡消失,记录此时的Kp,设定PID的Kp为当前值的60%~70%。Kp调试完成。
2.1.2 确定积分系数K1
比例增益Kp确定后,设定一个较大的积分系数K1的初值,然后逐渐减小K1,直至系统出现振荡,之后在反过来,逐渐加大K1,直至系统振荡消失。记录此时的K1设定PID的积分系数K1为当前值的150%~180%。K1调试完成。
2.1.3 确定微分系数KD
微分系数KD一般不用设定,为0即可。若要设定,与确定Kp和K1的方法相同,取不振荡时的30%。
2.1.4 微调
系统空载、带载联调,再对PID参数进行微调,直至满足要求。
2.2 PID参数整定过程
PMAC的PID参数可以通过手动或自动的方式来设定,为了获得较好的系统性能,我们采用手动的方式来设定系统的PID参数。PID参数的整定就是执行PMAC运动控制卡的PID执行程序来激励电机,采集响应数据,绘制响应曲线,然后根据指标要求来评估响应。
下面具体来整定数控系统的PID参数。
整定之前,首先要检查试验台连接是否正确,然后开机,运行PID执行程序。PID执行程序提供的信号源有7种,用户还可以自定义信号源。在调整时主要用2种信号源,即阶跃位置信号(positionsStep)和抛物线速度(parabolic velocity)信号,可以调整这2种信号的特性(信号的幅度、时间)。通过调整与系统特性相关的参数来调整系统的特性,改变了其中的参数以后,就可以执行阶跃响应过程或抛物线响应过程。阶跃响应过程主要用来调整系统的P,I,D等参数,而抛物线响应主要是用来调整系统的动态特性,涉及到的参数主要是速度和加速度前馈。调节界面如图2所示。
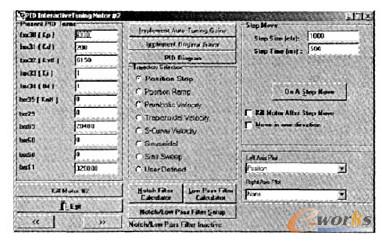
图2 PID执行程序界面
- 上一篇文章:PLC触摸屏直接控制伺服电机程序设计
- 下一篇文章:安全集成伺服驱动技术