



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于三菱运动控制单元的碾铆机数控系统
利用摆动碾压技术的碾铆工艺,被广泛应用在计算机外设、办公设备、家用电器、汽车等制造领域,其铆接质量稳定可靠,铆接过程平稳无冲击,是一种理想的铆接工艺。随着我国经济技术的发展,世界上一些知名的打印机、复印机厂商将零件加工转移到我国来生产,但许多生产这些零件的工厂所使用的碾铆机仍为手工操作,效率低、劳动强度大,质量不稳定,迫切需要通过使用自动碾铆机来提高效率和提高质量。由于生产批量大,工厂使用碾铆机的数量多,对自动碾铆机的经济性有很高的要求,而市场上尚未有合适的成品自动碾铆机。因此,开发出效率高、质量好、经济性好的自动碾铆机,具有重要的经济和技术意义。
由于对自动碾铆机的成本控制要求高,而数控系统又占了成本中较大的比例,因此,开发出一种经济性好、质量好、可靠性高的数控系统成了开发这种自动碾铆机的关键。
1 数控系统的主要功能
数控碾铆机的基本结构如图1所示,主要由碾铆工作头及XY数控工作台组成。碾铆工作头的主轴由电机带动旋转,并在气缸的驱动下作上下运动。铆头的轴线与主轴轴线成一定的角度。铆头一方面绕着主轴轴线公转(摆动与章动),另一方面铆头在工件表面滚动,形成绕着自身的轴线的自转。铆头在气缸的压力下,使轴销的端部受到局部加压,产生连续的塑性变形,经一定的工艺时间,销轴与支持架被牢固地铆接在一起(图1(A))。
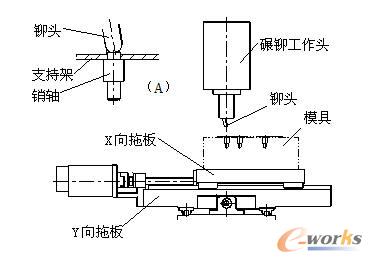
在打印机、复印机等设备的齿轮传动系统中,常常有多条平行的传动销轴需要与支持架铆接在一起。使用普通碾铆机进行加工时,通过手工移动模具,将各铆接点逐一移到铆头下进行碾铆,效率低,劳动强度大,每个工序铆接的点数有限,平行度不易保证,质量不稳定。
利用数控碾铆机对这类零件进行碾铆加工的基本工艺过程如下:首先数控工作台将模具移到装卸工位,将销轴及支持架安放在模具对应的定位面上,通过电磁铁将支持架吸紧,然后数控工作台按照编程好的坐标位置,将各个铆接点依次移动到铆头下,控制系统控制铆头压下,碾铆头对工件进行碾铆加工,经设定的碾铆时间,完成该点零件的加工。当完成全部销轴的碾铆后,回到装卸工位,卸料气缸将铆接好的工件顶起卸料。
因此,碾铆机的数控系统的主要任务是实现对XY工作台的运动控制,由于在进行碾铆加工之前,工件(传动支架)已经过冲压、折弯成型,为了能避开工件中弯起的部位,要求XY工作台具有直线或圆弧插补功能。同时,数控系统还要控制碾铆工作头的升降、主轴的启动及停止,控制卸料气缸及夹紧电磁铁的动作,并进行相应的人机的交互,如加工程序的输入、编辑,以及设备的工作状态的显示等。
2 数控系统的结构及关键技术
由于对数控碾铆机的经济性有较高的要求,限制了它不能采用基于PC的通用CNC以及其它的通用数控系统。我们综合考虑了经济性、可靠性、开发的难易程度以及开发的周期等因素,特别要保证能在工厂的生产现场可靠运行,决定采用日本三菱公司的运动控制模块FX2N-20GM、FX2N系列的PLC以及图示操作终端F940GOT来开发数控碾铆机的数控系统。控制系统的基本结构如图2所示。
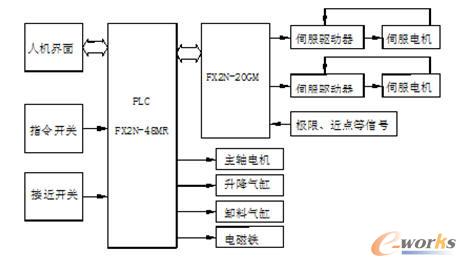
运动控制单元FX2N-20GM具有同时两轴的直线和圆弧插补,插补时输出频率可达100KHz,以及运动控制的基本功能,如正向及方向极限信号、近点信号、零点信号的处理、手动脉冲输入、手动控制、机械原点返回等功能。FX2N-20GM输出的运动信号为脉冲信号,可以与脉冲输入型的交流伺服驱动器配合使用。可见,运动控制单元FX2N-20GM很适合于用作碾铆机的运动控制。
分页
2.1 加工程序的传送
FX2N-20GM作为一个运动控制模块,本身不具备数控程序编辑输入等界面。三菱公司提供的SWOD5-FXVPS-E软件,虽然可以使用计算机串口,经RS232转RS422后,将运动轨迹输送到FX2N-20GM,但这只适用将固定的运动轨迹输入到FX2N-20GM,不适用于在生产中作为程序的输入工具来使用。由于三菱公司没有公开编译后的指令格式以及与FX2N-20GM通讯的相关协议,故无法采用类似的使用串口通讯的方法传送运动轨迹数据。所以,要使用FX2N-20GM为基础来构建数控系统,如何将不同零件的加工程序传送到FX2N-20GM去执行,成为首先要解决的问题。
FX2N-20GM采用自己特有的的控制及插补指令。在其插补指令中,可以使用数据寄存器作为直线及圆弧插补的坐标参数。利用这一点,在编写其运动控制程序时,用通用数据寄存器作为插补指令中运动轨迹的坐标变量来编写程序,然后通过PLC把运动参数送到这些通用寄存器,FX2N-20GM再根据这些参数完成相应的插补运动。
例如,直线插补时,采用32位数据寄存器DD100、DD102作为直线插补的终点坐标,DD104作为运动速度,插补指令可写成:
0020:cod01(LIN) xDD100 yDD102 fDD104;
LD M8000
DTO K0 K100 D201 K2
DTO K0 K104 D500 K1
……
在系统中,我们可将FX2N-20GM作为PLC的扩展模块使用,不同零件的加工程序被保存在PLC中。在加工过程中,通过PLC不断将运动轨迹的坐标、运动速度、各点的碾铆时间、碾铆点的数量等工艺参数,用32位的传送指令DTO送到FX2N-20GM的DD100、DD102、DD104等相关的寄存器,就可以控制FX2N-20GM的相应指令的执行。对应的PLC程序如下:
在以上PLC程序中,PLC中数据寄存器D201~D202,D203~D204保存了直线轨迹的终点X、Y坐标,DTO指令将X、Y坐标传送到FX2N-20GM的DD100及DD102。其中,FX2N-20GM的DD100、DD102对应的BFM号为#100~#103,DD104对应的BFM号为#104。
2.2 当前坐标及工作状态的获取
另一方面,系统的当前坐标、伺服系统的状态等参数,由PLC的FROM指令从FX2N-20GM中读回。FX2N-20GM中的当前X坐标的寄存器的BFM号为#9004(32位),Y坐标的寄存器的BFM号为#9014(32位),FX2N-20GM的工作状态,如就绪/忙、定位结束、回零结束等状态信息,保存在辅助继电器M9048~M9096中,对应的BFM号为#23、#24、#25、#26。因此,通过PLC的FROM指令,将X、Y当前坐标寄存器的值读回PLC的数据寄存器D110~D111,D112~D113,并将FX2N-20GM的工作状态等寄存器的值读入PLC的M100~M131中,供PLC控制使用,并显示在图示操作终端上。对应的PLC程序如下:
LD M8000
DFROM K0 K9004 D110 K1
DFROM K0 K9014 D112 K1
FROM K0 K23 K2M100 K1
FROM K0 K25 K2M108 K1
FORM K0 K24 K2M116 K1
FROM K0 K26 K2M124 K1
……
2.3 文件功能的实现
使用FX2N-20GM以及PLC等模块建立数控系统,要解决的另一个重要问题就是,加工程序的输入、编辑、保存等文件功能。
根据碾铆加工的特点,在所开发的数控碾铆机中,我们不采用G代码来表示加工程序,而是在图示操作终端中,用表格的形式输入与加工程序有关的数据,如各碾铆点的顺序、坐标、碾铆时间等加工数据,并将这些数据以文件的形式保存到PLC的停电保持数据单元中去。不同零件的加工数据可以保存到不同的文件中。在加工不同的零件时,可方便地将对应的文件调出来使用。根据实际生产的需要,需要保存100个加工程序,每个程序文件可储存24点的加工数据。
为了实现文件的功能,首先在PLC的数据单元中建立3个与文件有关的区段,第一为文件保存区,第二为文件编辑区,第三为运行文件区。
第一个区段为D1000开始的7K停电保持单元,划分成100段,每段保存一个加工程序。
第二个区段为D120~D191,作为文件编辑区,当要编辑某个加工程序时,通过变址V2使用块移动指令,将对应的文件数据从文件区,复制到临时文件区,然后,通过图示操作终端对该加工程序进行编辑,当编辑完成要保存修改后的文件时,再使用块移动指令,将临时文件区中编辑好的加工程序文件保存回对应的文件区。专门设立文件编辑区,可以避免在文件编辑保存之前,直接修改文件保存区的文件。
第三个区段为当前运行的程序文件区,D400~D471,当要运行某个加工程序时,通过变址V使用块移动指令,将对应的文件数据从文件区,复制到运行文件区。加工时,PLC程序从这个区段,将X、Y坐标、速度、碾铆时间等加工的参数取出,送到FX2N-20GM去控制碾铆机工作台的运动等。
2.4 人机交互功能的实现
人机交互采用三菱的图示操作终端F940GOT来实现。通过图示操作终端,实现加工程序的编程。根据零件的不同,输入各碾铆点的坐标、各点的碾铆时间以及移动的速度等。同时,数控碾铆机的工作状态,如当前坐标、伺服系统状态、碾铆工作头状态、顶料、夹紧、产量等可以在图示操作终端中实时显示出来。
3 结 论
本文介绍了我们研制的采用三菱运动控制单元FX2N-20GM、PLC以及图示操作终端等开发的碾铆机的数控系统,具有经济性好,可靠性高,质量稳定等特点,已被用于我们为深圳一家专为知名品牌生产复印机、打印机零部件的工厂所开发的多台数控碾铆机上。这些数控碾铆机投入生产已经两年多,比人工操作的碾铆机提高生产率5~7倍,质量也有较大的提高。
- 上一篇文章:瓦楞辊磨床经济型数控系统设计
- 下一篇文章:针对目前国内经济型数控系统的性能分析